Review:
Design and Experimental Evaluation of a Performance-Driven PID Controller
Toru Yamamoto*1, Takuya Kinoshita*2, Yoshihiro Ohnishi*3, and Sirish L. Shah*4
*1Institute of Engineering, Hiroshima University
1-4-1 Kagamiyama, Higahi-Hiroshima, Hiroshima 739-8527 Japan
*2Graduate School of Engineering, Hiroshima University
1-4-1 Kagamiyama, Higahi-Hiroshima, Hiroshima 739-8527, Japan
*3Faculty of Education, Ehie University
3 Bunkyocho, Matsuyama, Ehime 790-8577, Japan
*4Department of Chemical and Materials Engineering, University of Alberta
Edmonton, AB T6G 1H9, Canada

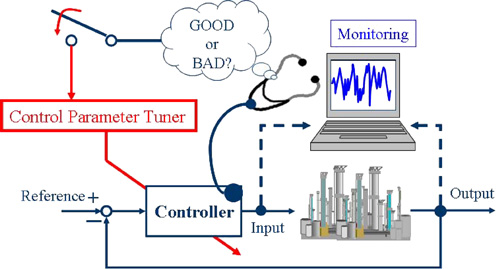
Outline of the performance-driven PID control system
- [1] T. Yamamoto, “The role of ‘Control’ in Chemical Processes – Energy Saving by ‘Control’ –,” J. of SICE, Vol.51, No.10, pp. 962-967, 2012 (in Japanese).
- [2] T. J. Harris, “Assessment of Closed Loop Performance,” J. Canadian J. of Chemical Engineering, Vol.67, pp. 856-861, 1989.
- [3] L. Desborough and T. J. Harris, “Performance Assessment Measures for Univariate Feedback Control,” Canadian J. of Chemical Engineering, Vol.70, pp. 1186-1197, 1992.
- [4] B. Huang and S. L. Shah, “Performance Assessment of Control Loops: Theory and Applications,” Springer-Verlag, London, 1999.
- [5] M. Jelali, “Control Performance Management in Industrial Automation,” Springer-Verlag, London, 2013.
- [6] M. Kano (Ed.), “Control Performance Monitoring – For Practical Use in Process Industries –,” Final report of Workshop No.25, The committee on Process Systems Engineering of Japan Society for the Promotion of Science, 2005 (in Japanese).
- [7] K. J. Åström, U. Borisson, L. Ljung, and B. Wittenmark, “Theory and Applications of Self-Tuning Regulators,” Automatica, Vol.13, pp. 457-476, 1977.
- [8] D. W. Clarke and P. J. Gawthrop, “Self-Tuning Control,” Proc. IEE, Vol.126D-6, pp. 633-640, 1979.
- [9] P. E. Wellstead and M. B. Zarrop, “Self-Tuning Systems; Control and Signal Processing,” John Wiley & Sons, 1991.
- [10] S. Omatu and T. Yamamoto (Eds.), “Self-Tuning Control,” Corona Publishing Co. Ltd., 1996 (in Japanese).
- [11] T. Yamamoto and M. Kaneda, “A Design of Self-Tuning PID Controllers Based on the Generalized Minimum Variance Control Law,” Trans. of the Institute of Systems, Control and Information Engineers, Vol.11, No.1, pp. 1-9, 1998 (in Japanese).
- [12] T. Yamamoto and S. L. Shah, “Design and Experimental Evaluation of a Multivariable Self-Tuning PID Controller,” IEE Proc. of Control Theory and Applications, Vol.151, No.5, pp. 645-652, 2004.
- [13] E. Mishkin and L. Braun, “Adaptive Control Systems,” McGraw-Hill, New York, 1961.
- [14] I. D. Landau and M. Tomizuka, “Theory and Practice of Adaptive Control Systems,” Ohm Publishing Co. Ltd., 1981 (in Japanese).
- [15] M. Kanai, “Introduction to Robust Adaptive Control,” Ohm Publishing Co. Ltd., 1989 (in Japanese).
- [16] K. J. Åström and B. Wittenmark, “Adaptive Control,” Dover Publications, 2008.
- [17] Z. Iwai, I. Mizumoto, and H. Ohtsuka, “Simple Adaptive Control,” Morikita Publishing Co. Ltd., 2008 (in Japanese).
- [18] T. Yamamoto, Y. Ohnishi, and S. L. Shah, “Design of a Performance-Adaptive Proportional-Integral-Derivative Controller for Stochastic Systems,” Institute of Mechanical Engineering, Part-I, J. of Systems and Control Engineering, Vol.222, pp. 691-699, 2008.
- [19] Y. Ohnishi, K. Takao, T. Yamamoto, and S. L. Shah, “Design of a PID Controller with a Performance-Driven Adaptive Mechanism,” Proc. of American Control Conf., New York, pp. 1359-1364, 2007.
- [20] O. Kaneko, “Data-Driven Controller Tuning: FRIT Approach,” Proc. of 11th IFAC Int. Workshop on Adaptation and Learning in Control and Signal Processing, Caen, pp. 326-336, 2013.
- [21] N. Suda, “PID Control,” Asakura Publishing Co. Ltd., 1992 (in Japanese).
- [22] J. G. Zieglar and N. B. Nichols, “Optimum settings for automatic controllers,” Trans. ASME, Vol.64, No.8, pp. 759-768, 1942.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.