Paper:
Fictitious Reference Signal Based Real-Time Update of State Feedback Gains and its Experimental Verification
Yuki Okano* and Osamu Kaneko**
*Graduate School of Natural Science and Technology, Kanazawa University
Kakuma-machi, Kanazawa, Ishikawa 920-1192, Japan
**Department of Mechanical Engineering and Intelligent Systems, The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

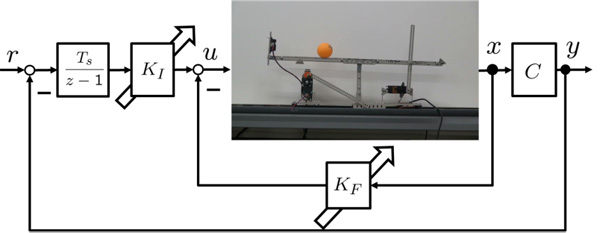
Real-time update of state feedback gains
- [1] R. W. Brockett, “Finite Dimensional Systems,” John Wiley and Sons, Inc. 1969.
- [2] K. Furuta and A. Sano, “Introduction to Linear System Theory,” CORONA Publishing Co., Ltd., 1978 (in Japanese).
- [3] Y. Yamashina, O. Kaneko, and S. Yamamoto, “Real-Time Parameter Tuning for the Feed-Forward Controller in a Two-Degree-of-Freedom Control System with FRIT,” Proc. of the 10th SICE Control Division Conf., 18412, 2012 (in Japanese).
- [4] H. Nakatsuka, T. Sato, T. Yamamoto, N. Araki, and Y. Konishi, “Feedforward Controller Tuning Method based on Online FRIT with Control Performance Evaluation,” Trans. of the Institute of Systems, Control, and Information Engineers, Vol.26, No.6, pp. 221-223, 2013 (in Japanese).
- [5] S. Masuda, “A Model Reference Adaptive Control Using On-Line Direct Control Parameter Tuning Method,” J. of the Society of Instruments and Control Engineers, Vol.52, No.10, pp. 860-865, 2013 (in Japanese).
- [6] Y. Wakasa, R. Azakami, S. Masuda, M. Tanaka, and S. Nakazima, “FRIT and RLS-based On-line Controller Tuning,” IEEJ Trans. Series C, Vol.133, No.10, pp. 1950-1956, 2013.
- [7] S. Souma, O. Kaneko, and T. Fujii, “A New Method of Controller Parameter Tuning Based on Input-Output Data-Fictitious Reference Iterative Tuning (FRIT),” Proc. of the 8th IFAC Workshop on Adaption and Learning Control and Signal Processing, pp. 788-794, 2004.
- [8] O. Kaneko, “Parameter Tuning of a Controller Based on the Direct Use of the Data,” J. of the Society of Instruments and Control Engineers, Vol.47, No.11, pp. 903-908, 2008 (in Japanese).
- [9] O. Kaneko, “Data-Driven Controller Tuning: FRIT Approach (Tutorial),” 11th IFAC Workshop on Adaptation and Learning in Control and Signal Processing, pp. 326-336, 2013.
- [10] M. C. Campi, “A. Lecchini, and S. M. Savaresi, Virtual Reference Feedback Tuning: a Direct Method for the Design of Feedback Controllers,” Automatica, Vol.38, pp. 1337-1346, 2002.
- [11] M. G. Safonov and T. C. Tsao, “The Unfalsified Control Concept and Learning,” IEEE Trans. on Automatic and Control, Vol.42, No.6, pp. 843-847, 1997.
- [12] M. Hirata, “Let’s Start Control Systems Design with Arduino and MATLAB,” Tech Share Co. Ltd., 2012 (in Japanese).
- [13] F. Sawakawa, O. Kaneko, and S. Yamamoto, “Data-Driven Update of State feedback Gains in Servo Systems,” Proc. of the 55th Joint Conf. on Automatic Control, pp. 821-824, 2012 (in Japanese).
- [14] Y. Okano, O. Kaneko, F. Sawakawa, and S. Yamamoto, “FRIT Based Recursive Update of Feedback Gains in the Integral Type Servo Systems,” Proc. of SICE Annual Conf. 2014, pp. 21-24, 2014.
- [15] H. Goto, M. Ishida, and K. Sagawa, “Stability estimation of standing posture using PID control law,” Proc. of the Annual Meetings of SICE Tohoku Chapter, 265-7, 2011 (in Japanese).
- [16] T. Suzuki, T. Shinnaka, and K. Tanaka, “Simple Proof of the Generalized Adaptive Law and Some Properties pf the Constant-Trace Algorithm,” Trans. of the Society of Instrument and Control Engineers, Vol.18, No.11, pp. 1074-1079, 1982 (in Japanese).
- [17] I. Landau and R. Logano, “Unification of Discrete Time Explicit Model Reference Adaptive Control Designs,” Automatica, Vol.17, Issue 4, pp. 593-611, 1981.
- [18] O. Kaneko, F. Sawakawa, and S. Yamamoto, “Data-driven update of state feedback gains,” Trans. of the Society of Instrument and Control Engineers, Vol.49, No.6, pp. 632-638, 2013 (in Japanese).
- [19] P. Bogacki and L. F. Shampine, “A 3(2) Pair of Runge-Kutta Formulas,” Applied Mathematics Letters, Vol.2, Issue 4, pp. 321-325, 1989.
- [20] S. Wakitani, T. Nawachi, G. R. Martins, and T. Yamamoto, “Design and Implementation of a Data-Oriented Nonlinear PID Controller,” J. of Advanced Computational Intelligence and Intelligent Informatics, Vol.17, No.5, pp. 690-698, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.