Paper:
Bipedal Locomotion Control Based on Simultaneous Trajectory and Foot Step Planning
Kouta Goto, Yuichi Tazaki, and Tatsuya Suzuki
Department of Mechanical Science and Engineering, Graduate School of Engineering, Nagoya University
Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8603, Japan

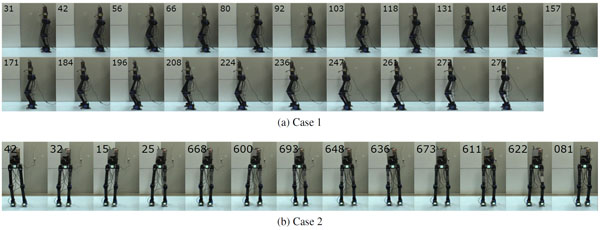
Snapshots of a bipedal robot walking forward (upper figure) and walking sideways (lower figure)
- [1] J. Chestnutt and J. Kuffner, “A Tiered Planning Strategy for Biped Navigation,” IEEE-RAS Int. Conf. on Humanoid Robots, pp. 422-436, 2004.
- [2] J. Chestnutt, M. Lau, G. Cheung, J. Kuffner, J. Hodgins, and T. Kanade, “Footstep Planning for the Honda ASIMO Humanoid,” IEEE Int. Conf. on Robotics and Automation, pp. 629-634, 2005.
- [3] J. Chestnutt, K. Nishiwaki, J. Kuffner, and S. Kagami, “An Adaptive Action Model for Legged Navigation Planning,” IEEE-RAS Int. Conf. on Humanoid Robots, pp. 196-202, 2007.
- [4] L. Baudouin, N. Perrin, T. Moulard, F. Lamiraux, O. Stasse, and E. Yoshida, “Real-time, Replanning Using 3D Environment for Humanoid Robot,” IEEE-RAS Int. Conf. on Humanoid Robots, pp. 584-589, 2011.
- [5] J. Garimort and A. Hornung, “Humanoid Navigation with Dynamic Footstep Plans,” IEEE Int. Conf. on Robotics and Automation, pp. 3982-3987, 2011.
- [6] A. Hornung, A. Dornbush, M. Likhachev, and M. Bennewitz, “Anytime Search-Based Footstep Planning with Suboptimality Bounds,” IEEE-RAS Int. Conf. on Humanoid Robots, pp. 674-679, 2012.
- [7] R. Deits and R. Tedrake, “Footstep Planning on Uneven Terrain with Mixed-Integer Convex Optimization,” IEEE-RAS Int. Conf. on Humanoid Robots, 2014.
- [8] S. Kajita, F. Kanehiro, K. Kaneko, K. Fujiwara, K. Yokoi, and H. Hirukawa, “A Realtime Pattern Generator for Biped Walking,” IEEE Int. Conf. on Robotics and Automation, pp. 31-37, 2002.
- [9] S. Kajita?CF. Kanehiro?CK. Kaneko, K. Fujiwara, K. Harada, K. Yokoi, and H. Hirukawa, “Biped Walking Pattern Generation by using Preview Control of Zero-Moment Point,” IEEE Int. Conf. on Robotics and Automation, pp. 1620-1626, 2003.
- [10] K. Nishiwaki, S. Kagami, Y. Kuniyoshi, M. Inaba, and H. Inoue, “Online Generation of Humanoid Walking Motion based on a Fast Generation Method of Motion Pattern that Follows Desired ZMP,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2684-2689, 2002.
- [11] K. Nishiwaki and S. Kagami, “Online Walking Control System for Humanoids with Short Cycle Pattern Generation,” Int. J. of Robotics Research, Vol.28, No.6, pp. 729-742, 2009.
- [12] P.-B. Wieber, “Trajectory Free Linear Model Predictive Control for Stable Walking in the Presence of Strong Perturbations,” IEEE-RAS Int. Conf. on Humanoid Robots, 2006.
- [13] H. Diedam, D. Dimitrov, P.-B. Wieber, K. Mombaur, and M. Diehl, “Online Walking Gait Generation with Adaptive Foot Positioning through Linear Model Predictive Control,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2008.
- [14] J. Liu, F. Xue, and X. Chen, “A Universal Biped Walking Generator for Complex Environments with Pattern Feasibility Checking,” Int. J. of Humanoid Robotics, Vol.8, No.2, pp. 323-357, 2011.
- [15] S. Feng, X. Xinjilefu, W. Huang, and C. G. Atkeson, “3D Walking Based on Online Optimization,” IEEE-RAS Int. Conf. on Humanoid Robots, 2013.
- [16] J. Englsberger, C. Ott, and A. Albu-Schäffer, “Three-dimensional Bipedal Walking Control Using Divergent Component of Motion,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2600-2607, 2013.
- [17] S. Kuindersma, F. Permenter, and R. Tedrake, “An Efficiently Solvable Quadratic Program for Stabilizing Dynamic Locomotion,” IEEE Int. Conf. on Robotics and Automation, pp. 2589-2594, 2014.
- [18] A. Herdt, H. Diedam, P.-B. Wieber, D. Dimitrov, K. Mombaur, and M. Diehl, “Online Walking Motion Generation with Automatic Foot Step Placement,” Advanced Robotics, Vol.24, No.5-6, pp. 719-737, 2010.
- [19] S. Faraji, S. Pouya, and A. Ijspeert, “Robust and Agile 3D Biped Walking with Steering Capability Using a Footstep Predictive Approach,” Robotics Science and Systems, 2014.
- [20] N. Perrin, O. Stasse, L. Baudouin, F. Lamiraux, and E. Yoshida, “Fast Humanoid Robot Collision-Free Footstep Planning Using Swept Volume Approximations,” IEEE Trans. on Robotics, Vol.28, No.2, pp. 427-439, 2011.
- [21] S. Dalibard, A. El Khouryz, F. Lamiraux, M. Taix, and J. P. Laumond, “Small-space Controllability of a Walking Humanoid Robot,” IEEE-RAS Int. Conf. on Humanoid Robots, pp. 739-744, 2011.
- [22] H. Miura and I. Shimoyama, “Dynamic Walk of a Biped,” Int. J. of Robotics Research, Vol.3, No.2, pp. 60-74, 1984.
- [23] Y. Fujimoto and A. Kawamura, “Proposal of Biped Walking Control Based on Robust Hybrid Position/Force Control,” IEEE Int. Conf. on Robotics and Automation, pp. 2724-2730, 1996.
- [24] T. Sugihara, “Biped Control to Follow Arbitrary Referential Longitudinal Velocity Based on Dynamics Morphing,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1892-1897, 2012.
- [25] Y. Tazaki and T. Suzuki, “Constraint-Based Prioritized Trajectory Planning for Multi-Body Systems,” IEEE Trans. on Robotics, Vol.30, No.5, pp. 1227-1234, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.