Paper:
Control of Low-Cost Customizable Robot Arm Actuated by Elastic Tendons
Junki Togashi*, Kazuhisa Mitobe*, and Genci Capi**
*Department of Mechanical Systems Engineering, Yamagata University
4-3-16 Yonezawa 992-8510, Japan
**Department of Mechanical Engineering, Hosei University
3-7-2 Kajinocho, Koganei, Tokyo 184-8584, Japan

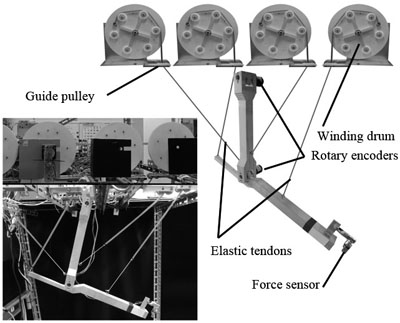
Elastic tendon driven robot arm
- [1] H. Asada and Y. Kakumoto, “The dynamic RCC hand for high-speed assembly,” IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 120-125, 1988.
- [2] Y. Xu and R. P. Paul, “A robot compliant wrist system for automated assembly,” IEEE Int. Conf. on Robotics and Automation, Vol.3, pp.1750-1755, 1990.
- [3] T. Matsuno, T. Fukuda, and Y. Hasegawa, “Insertion of Long Peg into Tandem Shallow Hole Using Search Trajectory Generation,” J. of Robotics and Mechatronics, Vol.16, No.6, pp. 613-621, 2004.
- [4] M. T. Mason, “Compliance and Force Control for Computer Controlled Manipulators,” IEEE Trans. on Systems, Man and Cybernetics, Vol.11, Issue 6, pp. 418-432, 1981. beginfigure[p] špace-20pt centering includegraphics[width=8.1cm]./fig/fig27_2.eps špace-5pt captionArm end position response using hybrid feedback control. špace0pt endfigure beginfigure[t] centering includegraphics[width=8.2cm]./fig/fig28_2.eps špace-5pt captionForce response under force feedback and integral compensation. endfigure
- [5] B. J. Waibel and H. Kazerooni, “Theory and Experiments on the Stability of Robot Compliance Control,” IEEE Trans. on Robotics and Automation, Vol.7, No.1, pp. 95-104, 1991.
- [6] D. Whitney, T. Kurfess, A. Todtenkopf, M. Brown, and A. Edsall, “Development and control of an automated robotic weld bead grinding system,” ASME J. Dyn. Syst. Meas. Contr, Vol.112, No.2, pp. 166-176, 1990.
- [7] G. K. Klute, J. M. Czerniecki, and B. Hannaford, “McKibben artificial muscles: pneumatic actuators with biomechanical intelligence,” Proc. Int. Conf. on Advanced Intelligent Mechatronics, pp. 221-226, 1999.
- [8] B. Tondu and P. Lopez, “Modeling and control of McKibben Artificial Muscle Robot Actuators,” IEEE Control systems magazine, pp. 15-38, 2000.
- [9] N. Saga, J. Nagase, and Y. Kondo, “Development of a Tendon-Driven System Using a Pneumatic Balloon,” J. of Robotics and Mechatronics, Vol.18, No.2, pp. 139-145, 2006.
- [10] T. Noritsugu, M. Kubota, and S. Yoshimatsu, “Development of Pneumatic Rotary Soft Actuator Made of Silicone Rubber,” J. of Robotics and Mechatronics, Vol.13, No.1, pp. 17-22, 2001.
- [11] G. Tonietti, R. Schiavi, and A. Bicchi, “Design and control of a variable stiffness actuator for safe and fast physical human/robot interaction,” Int. Conf. on Robotics and Automation (ICRA), pp. 526-531, 2005.
- [12] K. Koganezawa, H. Inomata, and T. Nakazawa, “Actuator with non-linear elastic system and its application to 3 DOF wrist joint,” Int. Conf. on Mechatronics and Automation, Vol.3 pp. 1253-1260, 2005.
- [13] K. Koganezawa and M. Yamazaki, “Mechanical stiffness control of tendon-driven joints,” Int. Conf. on Intelligent Robots and Systems (IROS’99), pp. 818-825, 1999.
- [14] K. Koganezawa, Y. Watanabe, and N. Shimizu, “Antagonistic muscle-like actuator and its application to multi-d.o.f. forearm prosthesis,” Advanced Robotics, Vol.12, No.7-8, pp. 771-789, 1997.
- [15] N. Hogan, “Impedance Control: An Approach to Manipulation: Part II – Implementation,” ASME, J. Dyn. Sys. Meas. Control, Vol.107, No.1, pp. 8-16, 1985.
- [16] H. Hemami and J. Dinneen, “A Marionette-Based Strategy for Stable Movement,” IEEE Trans. on Systems, Man, and Cybernetics, Vol.23, No.2, pp. 502-511, 1993.
- [17] K. Yamane, J. K. Hodgins, and H. B. Brown, “Controlling a Marionette with Human Motion Capture Data,” IEEE Int. Conf. Robotics and Automation, 2003.
- [18] T. Lens and O. von Stryk, “Investigation of Safety in Human-Robot-Interaction for a Series Elastic, Tendon-Driven Robot Arm,” Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4309-4314, 2012.
- [19] G. A. Pratt and M. M. Williamson, “Series elastic actuators,” Int. Conf. on Intelligent Robots and Systems, Vol.1, pp. 399-406, 1995.
- [20] T. Lens and O. von Stryk, “Design and Dynamics Model of a Lightweight Series Elastic Tendon-Driven Robot Arm,” 2013 IEEE Int. Conf. on Robotics and Automation (ICRA), Karlsruhe, pp. 4512-4518, May 6-10, 2013.
- [21] K. W. Hollander, R. Llg, T. G. Sugar, and D. J. Herring, “An efficient robotic tendon for gait assistance,” Biomech. Eng., Vol.128, No.5, pp. 788-791, 2006.
- [22] F. A. MussaIvaldi, “Human Movement Understanding,” Part II, Chapter 1, pp. 161-212, Elseier, 1986.
- [23] T. Tsuji, “Human Arm Impedance in Multi-Joint Movements, Self-Organization, Computational Maps, and Motor Control,” pp. 357-380, Elsevier, 1997.
- [24] H. Kobayashi, K. Hyodo, and D. Ogane, “On Tendon-Driven Robotic Mechanisms with Redundant Tendons,” Int. J. of Robotics Research, Vol.17, No.5, pp. 561-571, 1998.
- [25] M. H. Raibert and J. J. Craig, “Hybrid Position/Force Control of Manipulators,” ASME J. of Dynamic Systems, Measurement, and Control, Vol.103, No.2, pp. 126-133, 1981.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.