Paper:
Oncoming Human Avoidance for Autonomous Mobile Robot Based on Gait Characteristics
Tetsuo Tomizawa and Yuya Shibata
The University of Erectro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

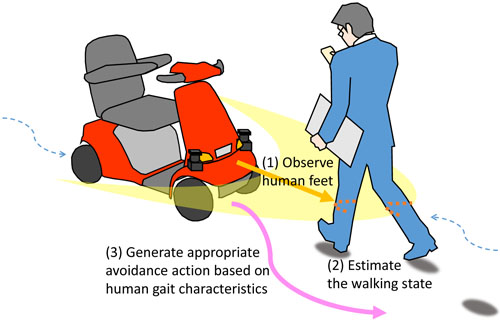
Overview of oncoming human avoidance
- [1] T. Tomizawa, S. Muramatsu, M. Sato, M. Hirai, S. Kudoh, and T. Suehiro, “Development of an Intelligent Senior-Car in a Pedestrian Walkway,” Advanced Robotics, Vol.26, No.14, pp. 1577-1602, 2012.
- [2] S. Ohkawa, Y. Takita, H. Date, and K. Kobayashi, “Development of Autonomous Mobile Robot Using Articulated Steering Vehicle and Lateral Guiding Method,” J. of Robotics and Mechatronics, Vol.27, No.4, pp. 337-345, 2015.
- [3] J. Eguchi and K. Ozaki, “Development of Autonomous Mobile Robot Based on Accurate Map in the Tsukuba Challenge 2014,” J. of Robotics and Mechatronics, Vol.27, No.4, pp. 346-355, 2015.
- [4] K. Okawa, “Three Tiered Self-Localization of Two Position Estimation Using Three Dimensional Environment Map and Gyro-Odometry,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 196-203, 2014.
- [5] D. Fox, W. Burgard, and S. Thrun, “The Dynamic Window Approach to Collision Avoidance,” IEEE Robotics and Automation Magazine, pp. 23-33, 1997.
- [6] Y. Tamura, S. Hamasaki, A. Yamashita, and H. Asama, “Collision avoidance of mobile robot based on prediction of human movement according to environments.” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.79, No.799, pp. 617-628, 2013.
- [7] H. Noguchi, T. Yamada, T. Mori, and T. Sato, “Human Avoidance Path Planning based on Massive People Trajectories,” J. of the Robotics Society of Japan, Vol.30, No.7, pp. 684-694, 2012 (in Japanese).
- [8] S. Thompson, T. Horiuchi, and S. Kagami, “A Probabilistic Model of Human Motion and Navigation Intent for Mobile Robot Path Planning,” Proc. of the Int. Conf. on Autonomous Robots and Agents (ICARA) 2009, pp. 663-668, 2009.
- [9] M. Yoda and Y. Shiota, “A Study on the Mobile Robot which Passes a Man,” J. of the Robotics Society of Japan, Vol.17, No.2, pp. 202-209, 1999 (in Japanese).
- [10] D. Helbing and P. Molnar, “Social Force Model for Pedestrian Dynamics,” Physical Review E, Vol.51, No.5, pp. 4282-4286, 1995.
- [11] Y. Shibata and T. Tomizawa, “A Study of the Adaptive Avoidance Behavior Based on Human Gait Features,” The Proc. of the 16th SICE System Integration Division Annual Conf., pp. 1373-1376, 2015 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.