Paper:
Prototyping of Kinematics Simulator for Supporting Autonomous Mobile Robot Development
Kitaro Shimane, Ryo Ueda, and Susumu Tarao
Department of Mechanical Engineering, National Institute of Technology, Tokyo College
1220-2 Kunugida-machi, Hachioji-shi, Tokyo 193-0997, Japan

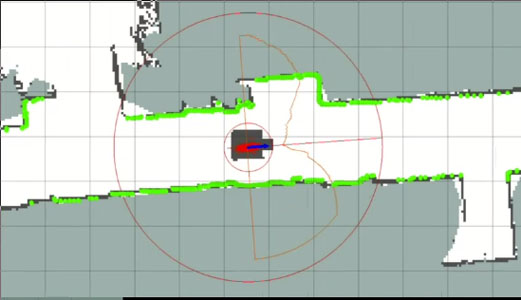
Appearance of the kinematics simulator
- [1] S. Yuta, “Open Experiment of Autonomous Navigation of Mobile Robots in the City: Tsukuba Challenge 2014 and the Results,” J. of Robotics and Mechatronics, Vol.27, No.4, pp. 318-326, 2015.
- [2] A. Yamakawa, S. Sasaki, D. N. Bach, T. Hayashi, and S. Tarao, “Autonomous Wheelchair Robot Takao 4 Focused on Compact Mobility,” Proc. 2014 JSME Conf. Robotics and Mechatronics, 2A2-C07, 2014 (in Japanese).
- [3] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” MIT Press, 2005.
- [4] T. Higuchi, “Basis of Statistical Modeling for Prediction,” Kodansha Scientific, 2011 (in Japanese).
- [5] N. Koenig and A. Howard, “Design and Use Paradigms for Gazebo, An Open-Source Multi-Robot Simulator,” Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 2149-2154, 2004.
- [6] K. Shimane and S. Tarao, “Prototyping of Kinematics Simulator for Support for Autonomous Mobile Robot Development,” Proc. 2015 JSME Conf. Robotics and Mechatronics, 1P2-F04, 2015 (in Japanese).
- [7] J. Borenstein and L. Feng, “Gyrodometry: A New Method for Combining Data from Gyros and Odometry in Mobile Robots,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 423-428 1996.
- [8] J. E. Bresenham, “Algorithm for Computer Control of a Digital Plotter,” IBM Systems J., Vol.4, No.1, pp. 25-30, 1965.
- [9] E. Digor, A. Birk, and A. Nchter, “Exploration Strategies for a Robot with a Continuously Rotating 3D Scanner Simulation, Modeling, and Programming for Autonomous Robots,” Proc. Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR 2010), 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.