Paper:
A Flexible Tactile Sensor Array Based on Pressure Conductive Rubber for Contact Force Measurement and Slip Detection
Yancheng Wang*,**, Kailun Xi**, Deqing Mei*,**, Guanhao Liang**, and Zichen Chen**
*State Key Laboratory of Fluid Power and Mechatronic Systems, College of Mechanical Engineering, Zhejiang University
Hangzhou, 310027, China
**Key Laboratory of Advanced Manufacturing Technology of Zhejiang Province, Zhejiang University
Hangzhou, 310027, China

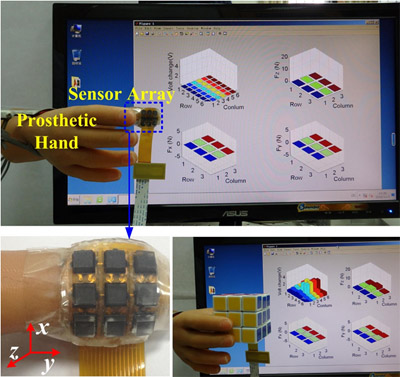
A wearable tactile sensor array for three-axis contact force measurement and slip detection in prosthetic hand grasping
- [1] V. Ho, M. Makikawa, and S. Hirai, “Flexible Fabric Sensor Toward a Humanoid Robot’s Skin: Fabrication, Characterization, and Perceptions,” IEEE Sensors J., Vol.13, pp. 4065-4080, 2013.
- [2] H. Lee, S, Chang, and E. Yoon, “A Flexible Polymer Tactile Sensor: Fabrication and Modular Expandability for Large Area Deployment,” J. Microelectromech. Syst., Vol.15, No.6, pp. 1681-1686, 2006.
- [3] Y. Wang, K. Xi, G. Liang, D. Mei, and Z. Chen, “A Flexible Capacitive Tactile Sensor Array for Prosthetic Hand Real-Time Contact Force Measurement,” Proc. IEEE Int. Conf. on Information and Automation, pp. 937-942, 2014.
- [4] K. Kim, K. R. Lee, W. H. Kim, K. B. Park et al., “Polymer-based flexible tactile sensor up to 32×32 arrays integrated with interconnection terminals,” Sensors and Actuators A: Physical, Vol.156, pp. 284-291, 2009.
- [5] R. S. Dahiya, G. Metta, M. Valle, and G. Sandini, “Tactile sensing – from humans to humanoids,” IEEE Trans. on Robotics, Vol.26, pp. 1-20, 2010.
- [6] K. Noda, K. Hoshino, K. Matsumoto, and I. Shimoyama, “A shear stress sensor for tactile sensing with the piezoresistive cantilever standing in elastic material,” Sensors and Actuators A: Physical, Vol.137, pp. 295-301, 2006.
- [7] M. A. Qasaimeh, S. Sokhanvar, J. Dargahi, and M. Kahrizi, “PVDF-based microfabricated tactile sensor for minimally invasive surgery,” J. Microelectromech. Syst., Vol.18, No.1, pp. 195-207, 2009.
- [8] G. Liang, Y. Wang, D. Mei, K. Xi, and Z. Chen, “A modified analytical model to study the sensing performance of a flexible capacitive tactile sensor array,” J. Micromech. Microeng., Vol.25, pp. 035017-14, 2015.
- [9] H. K. Lee, J. Chung, S. Chang, and E. Yoon, “Real-time measurement of the three-axis contact force distribution using a flexible capacitive polymer tactile sensor,” J. Micromech. Microeng., Vol.21, pp. 1-9, 2011.
- [10] R. Ahmadi, M. Packirisamy, J. Dargahi, and R. Cecere, “Discretely loaded beam-type optical fiber tactile sensor for tissue manipulation and palpation in minimally invasive robotic surgery,” IEEE Sensors J., Vol.13, No.1, pp. 22-32, 2013.
- [11] T. Liu, Y. Inoue, and K. Shibata, “A small and low-cost 3-D tactile sensor for a wearable force plate,” IEEE Sensors J., Vol.9, No.9, pp.1103-1110, 2009.
- [12] T. Zhang, H. Liu, L. Jiang, S. W. Fan, and J. Yang, “Development of a flexible 3D tactile sensor system for anthropomorphic artificial hand,” IEEE Sensors J., Vol.13, pp. 510-518, 2013.
- [13] T. Zhang, L. Jiang, X. Wu, W. Feng, D. Zhou, and H. Liu, “Fingertip Three-Axis Tactile Sensor for Multifingered Grasping,” IEEE/ASME Trans. on Mechatronics, Vol.20, No.4, pp. 1875-1885, 2015.
- [14] C. Chuang, Y. Liou, and C. Chen, “Detection system of incident slippage and friction coefficient based on a flexible tactile sensor with structural electrodes,” Sensors and Actuators A: physical, Vol.188, pp. 48-55, 2012.
- [15] S. Teshigawara, K. Tadakuma, M. Aiguo, M. Ishikawa, and M. Shimojo, “High Speed and High Sensitivity Slip Sensor Utilizing Characteristics of Conductive Rubber,” J. of Robotics and Mechatronics, Vol.21, No.2, pp. 200-208, 2009.
- [16] Y. Suzuki, S. Teshigawara, M. Chiba, T. Shimada, A. Ming, and M. Shimojo, “Experimental Discussion of Occurrence of High-Frequency Component on Slip Sensor Output Using Pressure Conductive Rubber,” J. of Robotics and Mechatronics, Vol.25, No.2, pp. 316-323, 2013.
- [17] S. Teshigawara, T. Tsutsumi, S. Shimizu, Y. Suzuki, and A. Ming, “Highly Sensitive Sensor for Detection of Initial Slip and Its Application in a Multi-fingered Robot Hand,” Proc. IEEE, Int. Conf. on Robotics and Automation, pp. 1097-1102, 2011.
- [18] K. L. Xi, Y. C. Wang, D. Q. Mei, G. H. Liang, and Z. C. Chen, “A Flexible Tactile Sensor Array based on Pressure Conductive Rubber for Three-Axis Force and Slip Detection,” Proc. IEEE, Int. Conf. on Advanced Intelligent Mechatronics (AIM), pp. 476-481.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.