Paper:
Formation Control Considering Disconnection of Network Links for a Multi-UAV System: An LMI Approach
Shouhei Mori and Toru Namerikawa
Keio University
3-14-1 Hiyoshi, Kohoku-ku, Yokohama, Kanagawa 223-8522, Japan

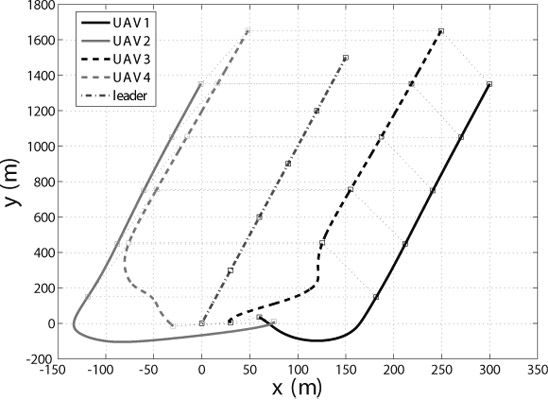
Formation control for multi-UAV system
- [1] W. Ren, R. W. Bread, and E. M. Atkins, “A Survey of Consensus Problem in Multi-agent Coordination,” IEEE Proc. of ACC, pp. 1859-1864, 2005.
- [2] R. Olfati-Saber, J. A. Fax, and R. M. Murray, “Consensus and cooperation in multi-agent networked systems,” Proc. of the IEEE, Vol.95, No.1, pp. 215-233, 2007.
- [3] Y. Kuriki and T. Namerikawa, “Control of Formation Configuration Using Leader-Follower Structure,” J. of System Design and Dynamics, Vol.7, No.3, pp. 254-264, 2013.
- [4] R. Olfati-Saber and R. Murray, “Consensus problems in networks of agents with switching topology and time-delays,” IEEE Trans. of A C, Vol.49, No.9, pp. 1520-1533, 2004.
- [5] J. Fax and R. Murray, “Information flow and cooperative control of vehicle formations,” IEEE Trans. of A C, Vol.49, No.9, pp. 1465-1476, 2004.
- [6] A. Gattami and R. Murray, “A frequency domain condition for stability of interconnected MIMO systems,” Proc. of ACC, pp. 3723-3728, 2004.
- [7] C. Yoshioka and T. Namerikawa, “Formation Control of Nonholonomic Multi-vehicle Systems Based on Virtual Structure,” Proc. of the 17th IFAC World Congress 2008, pp. 5149-5154, 2008.
- [8] I. Masubuchi, J. Kato, M. Saeki, and A. Ohara, “Gain-Scheduled Controller Design Based on Descriptor Representation of LPV Systems: Application to Flight Vehicle Control,” IEEE Proc. of CDC, pp. 815-820, 2004.
- [9] E. Semsar-Kazerooni and K. Khorasani, “Optimal Consensus Seeking in a Network of Multiagent Systems: An LMI Approach,” IEEE trans. Syst., Man, Cybern., B, Cybern., Vol.40, No.2, pp. 540-547, 2010.
- [10] S. Sasa, Y. Matsuda, M. Nakadate, and K. Ishikawa, “Ongoing Research on Disaster Monitoring UAV at JAXA’s Aviation Program Group,” Proc. of SICE Annual Conf. 2008, pp. 978-981, 2008.
- [11] Y. Kuriki and T. Namerikawa, “Formation Control of UAVs with a Fourth-order Flight Dynamics,” SICE J. of Control, Measurement, and System Integration , Vol.7, No.2, pp. 74-81, 2014.
- [12] Y. Kuriki and T. Namerikawa, “Experimental Validation of Cooperative Formation Control with Collision Avoidance for a Multi-UAV System,” Proc. of the 6th Int. Conf. on Automation, Robotics and Applications (ICARA 2015), pp. 531-536, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.