Paper:
Flight Characteristics of Quad Rotor Helicopter with Thrust Vectoring Equipment
Akitaka Imamura*, Masafumi Miwa**, and Junichi Hino**
*Osaka Sangyo University
3-1-1 Nakagaito, Daito, Osaka 574-8530, Japan
**Tokushima University
2-1 Minamijosanjima-cho, Tokushima 770-8506, Japan

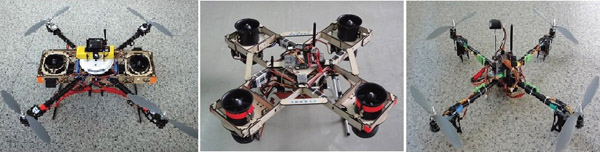
Thrust vectoring mechanisms for WRH
- [1] M. Miwa, Y. Shigematsu, and T. Yamashita, “Control of ducted fan flying object using thrust vectoring,” J. Syst. Des. Dyn., Vol.6, No.3, pp. 322-334, 2012.
- [2] A. Imamura, S. Uemura, M. Miwa, and J. Hino, “Flight Characteristics of Quad Ducted Fan Helicopter with Thrust Vectoring Nozzles,” The J. of Unmanned System Technology, Vol.2, No.1, pp. 54-61, June 2014.
- [3] A. Imamura, Y. Urashiri, M. Miwa, and J. Hino, “Flight Characteristics of Quad Rotor Helicopter with Tilting Rotor,” The J. of Instrumentation, Automation and Systems, Vol.1, No.2, pp. 56-63, 2014.
- [4] A. Imamura, M. Miwa, and J. Hino, “Flight Characteristics of a Quadrotor Helicopter Using Extra Deflecting Thrusters,” The J. of Instrumentation, Automation and Systems, Vol.1, No.2, pp. 64-71, 2014.
- [5] J. Fleming and T. Jones, “Improving control system effectiveness for ducted fan VTOL UAVs operating in crosswinds,” 2nd AIAA “Unmanned Unlimited” Conf. and Workshop & Exhibit, 2003-6514, 2003.
- [6] M. Kumon, H. Cover, and J. Katupitiya, “Hovering Control of Vectored Thrust Aerial Vehicles,” IEEE Int. Conf. on Robotics and Automation, pp. 1149-1154, 2010.
- [7] W. Shuai and Q. Xiao-hui, “Aerodynamic Data Model Analysis and Simulation of Ducted Fan UAV,” 2011 Int. Conf. on Electronics, Communications, and Control (ICECC), pp. 699-702, 2011.
- [8] J. Gebauer and P. Koci, “Measurements of Features of the Ducted Fan as a Possible Actuator of a Multi-copter Vehicle,” 2011 12th Int. Carpathian Control Conf. (ICCC), pp. 127-130, 2011.
- [9] M. Ryll, H. H. Bülthoff, and P. R. Giordano, “Modeling and control of a quad rotor UAV with tilting propellers,” IEEE Int. Conf. on Robotics and Automation, pp. 4606-4613, 2012.
- [10] M. Ryll, H. H. Bülthoff, and P. R. Giordano, “First Flight Tests for a Quadrotor UAV with Tilting Propellers,” IEEE Int. Conf. on Robotics and Automation, pp. 295-302, 2013.
- [11] P. Segui-Gasco, Y. Al-Rihani, S. Hyo-Sang, and A. Savvaris, “A novel actuation concept for a multi rotor UAV,” IEEE Int. Conf. on Unmanned Aircraft Systems, pp. 373-382, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.