Paper:
Views over last 60 days: 2,374
Suction Cup for Concrete Wall Testing Robot
Saeko Tokuomi and Kazuya Mori
Kumamoto University
2-39-1 Kurokami, Chuo-ku, Kumamoto 860-8555, Japan
Received:November 1, 2015Accepted:January 20, 2016Published:April 20, 2016
Keywords:testing robot, concrete wall, suction cup
Abstract
Efficient economical test methods are widely needed worldwide. One target of this is to develop climbing robots that check for defects in concrete. These concrete-wall-climbing robots generally use suction cups to support themselves and test apparatus, but the danger exists of this expensive equipment falling. This may occur due to one of two reasons. The first is inadequate ring-seal decompression in suction cups and the second is suction cup slippage. We have added claws to suction cups to help prevent slippage. The claws we developed are attached to the suction cups to help grip the wall. In the sections below, we discuss the scratch tests we performed to test claw effectiveness in improving suction cup grip. We then prove through tests under actual conditions that the estimated grip force matched that of an actual suction cup's grip force with the claw.
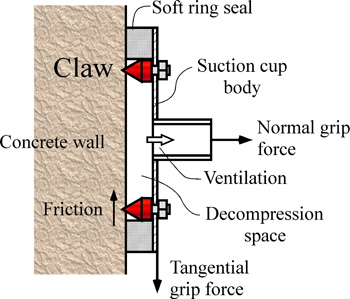
Claws attached to suction cups
Cite this article as:S. Tokuomi and K. Mori, “Suction Cup for Concrete Wall Testing Robot,” J. Robot. Mechatron., Vol.28 No.2, pp. 194-197, 2016.Data files:
References- [1] S. Tokuomi, K. Mori, and A. Miura, “Remote-Controlled Visual Inspection Machine for Bridge Supports,” Applied Mechanics and Materials, Vol.226-228, pp. 1665-1668, 2012.
- [2] D. Schmidt, C. Hillenbrand et. al., “Omnidirectional locomotion and traction control of the wheel-driven, wall-climbing robot, cromsci,” J. Robotica, Vol.29, pp. 991-1003, 2011.
- [3] N. Elkmann, M. Lucke et. al., “Kinematics, Sensors and Control of the Fully Automated Facade Cleaning Robot SIRIUSc for the Fraunhofer Headquarters Building, Munich,” 10th Int. Conf. on Climbing and Walking Robots and the Supporting Technologies for Mobile Machines (Clawar), pp. 169-176, 2007.
- [4] S. Tokuomi and K. Mori, “Vacuum Type Suction Cup,” Japan patent application number 2014-163669, 2014.
