Paper:
NLOS Satellite Detection Using a Fish-Eye Camera for Improving GNSS Positioning Accuracy in Urban Area
Shodai Kato*, Mitsunori Kitamura**, Taro Suzuki*, and Yoshiharu Amano*
*Waseda University
17 Kikui-cho, Shinjuku-ku, Tokyo 162-0044, Japan
**Electronic Navigation Research Institute
7-42-23 Jindaijihigashi-machi, Chofu-shi, Tokyo 182-0012, Japan

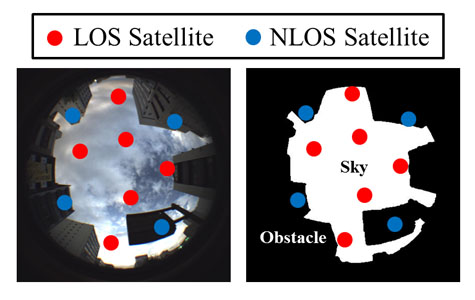
NLOS satellites detection method
- [1] E. Abbott and D. Powell, “Land-vehicle navigation using GPS,” Proc. of the IEEE, Vol.87, Issue 1, pp. 145-162, 1999.
- [2] S. Thrun et al, “Stanley: The robot that won the DARPA Grand Challenge,” J. of Field Robotics, Vol.23, Issue 9, pp. 661-692, 2006.
- [3] L. Wanga, P. D. Groves, and M. K. Ziebart, “Multi-Constellation GNSS Performance Evaluation for Urban Canyons Using Large Virtual Reality City Models,” J. of Navigation, Vol.65, Issue 03, pp. 459-476, 2012.
- [4] E. Schöonemann, M. Becker, and T. Springer, “A new Approach for GNSS Analysis in a Multi-GNSS and Multi-Signal Environment,” J. of Geodetic Science, Vol.1, Issue 3, pp. 204-214, 2011.
- [5] M. S. Braasch, “GPS Multipath Model Validation,” Position Location and Navigation Symposium, IEEE 1996, pp. 672-678, 1996.
- [6] P. D. Groves et. al, “A Portfolio Approach to NLOS and Multipath Mitigation in Dense Urban Areas,” Proc. of ION GNSS 2013, pp. 3231-3247, 2013.
- [7] Y. Lee, Y. Suh, and R. Shibasaki, “A Simulation System for GNSS Multipath Mitigation Using Spatial Statistical Methods,” Computers & Geosciences, Vol.34, No.11, pp. 1597-1609, 2008.
- [8] P. D. Groves, “Shadow Matching: A New GNSS Positioning Technique for Urban Canyons,” J. of Navigation, Vol.64, No.3, 2011.
- [9] D. Maier et. al, “Improved GPS Sensor Model for Mobile Robots in Urban Terrain,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 4385-4390, 2010.
- [10] T. Suzuki and N. Kubo, “GNSS Positioning with Multipath Simulation using 3D Surface Model in Urban Canyon,” ION GNSS 2012, pp. 438-447, 2012.
- [11] J. Meguro et al., “GPS Multipath Mitigation for Urban Area Using Omnidirectional Infrared Camera,” IEEE Trans. on Intelligent Transportation Systems, Vol.10, No.1, pp. 22-30, 2009.
- [12] T. Suzuki et. al, “Multipath Mitigation Using Omnidirectional Infrared Camera for Tightly Coupled GPS/INS Integration in Urban Environment,” ION GNSS 2011, pp. 2914-2922, 2011.
- [13] M. Kitamura et. al, “Improvement of GPS and GLONASS Positioning Accuracy by Multipath Mitigation Using Omnidirectional Infrared Camera,” J. of Robotics and Mechatronics, Vol.23, No.6, 2011.
- [14] D. Scaramuzza et. al, “A Toolbox for Easy Calibrating Omnidirectional Cameras,” IEEE Int. Conf. on Intelligent Robots and Systems (IROS 2006), 2006.
- [15] J. A. Hartigan and M. A. Wong, “Algorithm AS 136: A K-Means Clustering Algorithm,” J. of the Royal Statistical Society, Series C, Vol.28, No.1, pp. 20-30, 1979.
- [16] C. Chandhok, S. Chaturvedi, and A. A. Khurshid, “An Approach to Image Segmentation using K-means Clustering Algorithm,” Int. J. of Information Technology, Vol.1, Issue 1, pp. 11-17, 2012.
- [17] International Color Consortium, “Specification ICC.1:2004-10 (Profile version 4.2.0.0) Image technology colour management – Architecture profile format and data structure,” 2004.
- [18] B. Sirmacek and C. Unsalan, “Urban-Area and Building Detection Using SIFT Keypoints and Graph Theory,” IEEE Trans. on Geoscience and Remote Sensing, Vol.47, Issue 4, pp. 1156-1167, 2009.
- [19] D. I. Barnea and H. F. Silverman, “A class of algorithms for fast digital image registration,” IEEE Trans. on Computers, Vol.C-21, No.2, pp. 179-186, 1972.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.