Paper:
Collision Avoidance Using Contact Information with Multiple Objects by Multi-Leg Robot
Tomohito Takubo*, Keishi Kominami**, Kenichi Ohara***, Yasushi Mae**, and Tatsuo Arai**
*Graduate School of Engineering, Osaka City University
3-3-138 Sugimoto, Sumiyoshi-ku, Osaka 558-8585, Japan
**Graduate School of Engineering Science, Osaka University
1-3 Machikaneyama, Toyonaka, Osaka 560-8531, Japan
***Faculty of Science and Technology, Meijo University
1-501 Shiogamaguchi, Tempaku, Nagoya, Aichi 468-8502, Japan

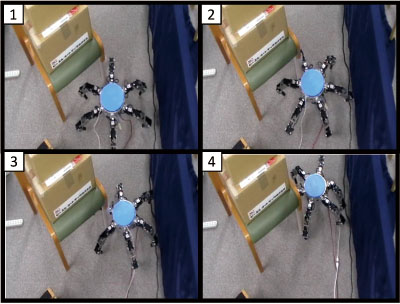
Optimized multi-point contacting walking
- [1] D. Ryu, S. Kang, M. Kim, and J. B. Song, “Multi-modal user interface for teleoperation of ROBHAZ-DT2 field robot system,” Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 168-173, 2004.
- [2] A. Mazumdar and H. H. Asada, “Mag-Foot: A steel bridge inspection robot,” Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 1691-1696, 2009.
- [3] M. Kamezaki, H. Iwata, and S. Sugano, “Operator support system based on primitive static states in intelligent operated-work machines,” Advanced Robotics, Vol.23, pp. 1281-1297, 2009.
- [4] A. Ohya, S. Yuta, T. Yoshida, E. Koyanagi, T. Imai, S. Kitamura, A. Takeuchi, and T. Minamikawa, “Development of Inspection Robot for Under Floor of House,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1429-1434, 2009.
- [5] S. Quinlan and O. Khatib, “Elastic Bands Connecting Path Planning and Control,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 802-807, 1993.
- [6] H. Yokoi, T. Mizuno, M. Takita, and Y. Kakazu, “Obstacle Avoidance Using Vibrating Potential Method (Self-Organization in a Narrow Path),” J. of Robotics and Mechatronics, Vol.8, No.4, pp. 356-363, 1996.
- [7] A. Ming, K. Kajihara, M. Kajitani, and M. Shimojo, “Development of a Rapid Obstacle Sensing System Using Sonar Ring for Mobile Robot,” Intelligent Autonomous Systems 7, IOS Press, pp. 301-308, 2002.
- [8] T. Yasuda, H. Tanaka K. Nakamura, and K. Tanaka, “Adjustability of Neural Networks with Variant Connection Weights for Obstacle Avoidance in an Intelligent Wheelchair,” J. of Advanced Computational Intelligence and Intelligent Informatics, Vol.11, No.8, pp. 922-930, 2007.
- [9] E. S. Jang, S. Jung, and T. C. Hsia, “Collision Avoidance of a Mobile Robot for Moving Obstacles Based on Impedance Force Control Algorithm,” Proc. of the IEEE/RSJ Inte. Conf. on Intelligent Robots and Systems, pp. 277-282, 2005.
- [10] S. Kato and K. W. Wong, “Intelligent Automated Guided Vehicle Controller with Reverse Strategy,” J. of Advanced Computational Intelligence and Intelligent Informatics, Vol.15, No.3, pp. 304-312, 2011.
- [11] T. Yamaguchi, K. Watanabe, K. Izumi, and K. Kiguchi, “Obstacle Avoidance for Quadruped Robots Using a Neural Network,” J. of Advanced Computational Intelligence and Intelligent Informatics, Vol.7, No.2, pp. 115-123, 2003.
- [12] M. R. Daud and K. Nonami, “Autonomous Walking over Obstacles by Means of LRF for Hexapod Robot COMET-IV,” J. of Robotics and Mechatronics, Vol.24, No.1, pp. 55-63, 2012.
- [13] J. Garimort, A. Hornung, and M. Bennewitz, “Humanoid Navigation with Dynamic Footstep Plans,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 3982-3987, 2011.
- [14] A. Hornung, A. Dornbush, M. Likhachev, and M. Bennewitz, “Anytime Search-Based Footstep Planning with Suboptimality Bounds,” Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (HUMANOIDS), 2012.
- [15] W. Huang, J. Kim, and C. G. Atkeson, “Energy-based Optimal Step Planning for Humanoids,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 3109-3114, 2013.
- [16] K. Tsukamoto, T. Takubo, K. Ohara, Y. Mae, and T. Arai, “Obstacle Avoidance Using Virtual Impedance Wall for Limb Mechanism Robot,” The 2009 IEEE Int. Conf. on Robotics and Biomimetics, pp. 604-610, 2009.
- [17] K. Kominami, T. Takubo, K. Ohara, Y. Mae, and T. Arai, “Optimization of Obstacle Avoidance Using Reinforcement Learning,” 2012 IEEE/SICE Int. Symposium on System Integration (SII2012), pp. 67-72, 2012.
- [18] T. Takubo, T. Arai, K. Inoue, H. Ochi, T. Konishi, T. Tsurutani, Y. Hayashibara, and E. Koyanag, “Integrated Limb Mechanism Robot ASTERISK,” J. of Robotics and Mechatronics, Vol.18, No.2, pp. 203-214, 2006.
- [19] K. R. Muller, S. Mika, G. Ratsch, K. Tsuda, and B. Scholkopf, “An introduction to kernel-based learning algorithms,” IEEE Trans. on Neural Networks, Vol.12, No.2, pp. 181-201, 2001.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.