Paper:
Human Detection and Face Recognition Using 3D Structure of Head and Face Surfaces Detected by RGB-D Sensor
Michio Tanaka, Hiroki Matsubara, and Takashi Morie
Kyushu Institute of Technology
2-4 Hibikino, Wakamatsu-ku, Kitakyushu 808-0196, Japan

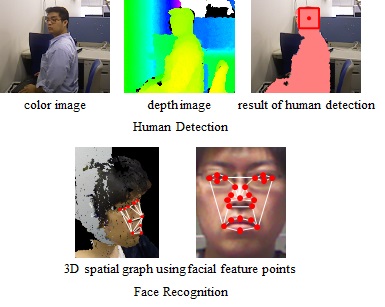 Summary of proposed method
Summary of proposed method- [1] N. Dalal, B. Triggs, and C. Schmid, “Human Detection Using Oriented Histograms of Flow and Appearance,” Proc. of the 9th European Conf. on Computer Vision, Vol.2, pp. 428-441, 2006.
- [2] H. C. Zeng, S. H. Huang, and S. H. Lai, “Real-Time Video Surveillance Based on Combining Foreground Extraction and Human Detection,” Advances in Multimedia Modeling Lecture Notes in Computer Science, Vol.4930, pp. 70-79, 2008.
- [3] Y. Kanzawa, T. Naito, and Y. Kimura, “Human Skin Detection by Visible and Near-Infrared Imaging,” IAPR Conf. on Machine Vision Applications, pp. 503-507, 2011.
- [4] S. Jia, J. Sheng, D. Chugo, and K. Takase, “Human Recognition Using RFID Technology and Stereo Vision,” J. Robotics and Mechatronics, Vol.21, No.1, pp. 28-35, 2009.
- [5] T. Aoki, K. Ito, T. Shibahara, and S. Nagashima, “High-Accuracy Machine Vision Using Phase-Only Correlation – Toward Image Sensing Technology Breaking the Limit of Pixel Resolution –” IEICE ESS Fundamentals Review, Vol.1, No.1, pp. 30-40, 2007.
- [6] K. Ito, A. Hayasaka, T. Aoki, H. Nakajimam, and K. Kobayashi, “A Study of Combination of 2D/3D Face Recognition Algorithms,” Symp. on Cryptography and Information Security, pp. 1-6, 2009.
- [7] X. Wang, Q. Ruan, and Y. Ming, “3D Face Recognition Using Corresponding Point Direction Measure and Depth Local Features,” IEEE 10th Int. Conf. on Signal Processing, pp. 86-89, 2010.
- [8] K. C. Kwak, W. Pedrycz, H. J. Go, and M. G. Chun, “Fuzzy Aggregation Method Using Fisherface and Wavelet Decomposition for Face Recognition,” J. of Advanced Computational Intelligence and Intelligent Informatics, Vol.8, No.4, pp. 379-384, 2004.
- [9] L. Xia, C. C. Chen, and J. K. Aggarwal, “Human Detection Using Depth Information by Kinect,” IEEE Computer Society Conf. on Computer Vision and Pattern Recognition Workshops, pp. 15-22, 2011.
- [10] L. Wiskott, J. M. Fellous, N. Kuiger, and C. v. d. Malsburg, “Face Recognition by Elastic Bunch Graph Matching,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.19, No.7, pp. 775-779, 1997.
- [11] J. G. Daugman, “Uncertainty Relation for Resolution in Space, Spatial Frequency, and Orientation Optimized by Two-Dimensional Visual Cortical Filters,” J. Optical Society of America A, Vol.2, No.7, pp. 1160-1169, 1985.
- [12] T. Morie, J. Umezawa, and A. Iwata, “Gabor-Type Filtering Using Transient States of Cellular Neural Networks,” Intelligent Automation and Soft Computing, Vol.10, No.2, pp. 95-104, 2004.
- [13] T. Morie, J. Umezawa, and A. Iwata, “A Pixel-Parallel Image Processor for Gabor Filtering Based on Merged Analog-Digital Architecture,” Symp. on VLSI Circuits, pp. 212-213, 2004.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.