Paper:
Simple Trajectory Control Method of Robot Arm Using Flexible Pneumatic Cylinders
Mohd Aliff*, Shujiro Dohta**, and Tetsuya Akagi**
*Graduate School of Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
**Department of Intelligent Mechanical Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan

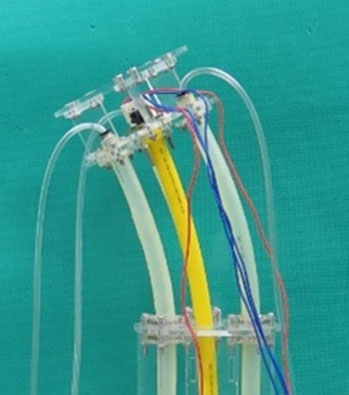 Flexible robot arm
Flexible robot arm- [1] M. Ishii, K. Yamamoto, and K. Hyodo, “Stand-alone wearable power assist suit – development and availability –,” J. of Robotics and Mechatronics, Vol.17, No.5, pp. 575-583, 2005.
- [2] J. Piquion, A. Nayar, A. Ghazaryan, R. Papanna, W. Klimek, and R. Laroia, “Robot-assisted gynecological surgery in a community setting,” J. of Robotic Surgery, Vol.3, No.2, pp. 61-64, 2009.
- [3] Y. Nagata, “Soft actuators – forefront of development –,” NTS Ltd., pp. 291-335, 2004.
- [4] T. Noritsugu, M. Takaiwa, and D. Sasaki, “Development of power assist wear using pneumatic rubber artificial muscles,” J. of Robotics and Mechatronics, Vol.21, No.5, pp. 607-613, 2009.
- [5] H. Kobayashi, T. Shiban, and Y. Ishida, “Realization of all 7 motions for the upper limb by a muscle suit,” J. of Robotics and Mechatronics, Vol.16, No.5, pp. 504-512, 2004.
- [6] N. Hogan and H. I. Krebs, “Interactive robots for neuro-rehabilitation,” Restorative Neurology and Neuroscience, Vol.22, pp. 349-358, 2004.
- [7] D. J. Reinkensmeyer, J. P. A. Dewald, and W. Z. Rymer, “Guidance-based quantification of arm impairment following brain injury: A pilot study,” IEEE Trans. on Rehabilitation Engineering, Vol.7, pp. 1-11, 1999.
- [8] P. S. Lum, C. G. Burgar, and P. C. Shor, “Evidence for improved muscle activation patterns after retraining of reaching movements with the MIME robotic system in subjects with post-stroke hemiparesis,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.12, pp. 186-194, 2004.
- [9] H. Zheng, R. Davies, H. Zhou, J. Hammerton, S. J. Mawson, P. M. Ware, and N. D. Black, “SMART project: Application of emerging information and communication technology to home-based rehabilitation for stroke patients,” Int. J. Disability and Human Development, Vol.5, pp. 271-276, 2006.
- [10] T. Fujikawa, S. Dohta, and T. Akagi, “Development and attitude control of flexible robot arm with simple structure using flexible pneumatic cylinders,” Proc. 4th Asia Int. Symp. on Mechatronics, pp. 136-141, 2010.
- [11] T. Akagi and S. Dohta, “Development of a rodless type flexible pneumatic cylinder and its application,” Trans. of JSME, Series C, Vol.73, No.731, pp. 2108-2114, 2007.
- [12] F. Zhao, S. Dohta, and T. Akagi, “Development and analysis of small-sized quasi-servo valve for flexible bending actuator,” Trans. of JSME, Series C, Vol.76, No.772, pp. 3665-3671, 2010.
- [13] M. Aliff, S. Dohta, and T. Akagi, “Trajectory control of simple-structured flexible mechanism using flexible pneumatic cylinders,” Proc. IEEE Int. Symp. on System Integration, SA1-1.4, pp. 19-24, 2013.
- [14] M. Aliff, S. Dohta, and T. Akagi, “Control and analysis of robot arm using flexible pneumatic cylinder,” J. of Mechanical Engineering, Vol.1, No.5, pp. 1-13, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.