Paper:
Development of a Robust Path-Planning Algorithm Using Virtual Obstacles for an Autonomous Mobile Robot
Kentaro Ueno, Tetsuo Kinoshita, Kazuyuki Kobayashi, and Kajiro Watanabe
Graduate School of Science and Engineering, Hosei University
3-7-2 Kajino-cho, Koganei, Tokyo 184-8584, Japan

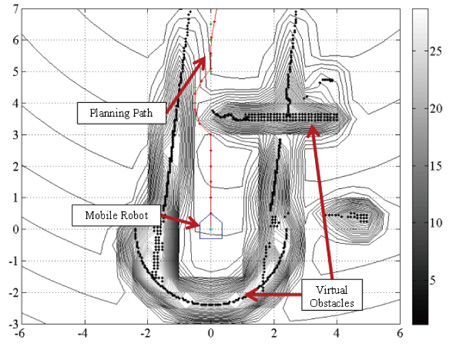
Proposed path-planning result
- [1] S. Yuta, “An open experiment of mobile robot autonomous navigation at the pedestrian streets in the city Tsukuba Challenge,” IEEE Mechatronics and Automation, pp. 904-909, 2011.
- [2] P. E. Hart, N. J. Nilsson, and B. Raphael, “A formal basis for the heuristic determination of minimum cost paths,” IEEE Trans. on SSC, Vol.4, No.2, pp. 100-107, 1968.
- [3] S. M. LaValle, “Planning algorithms,” Cambridge university press, 2006.
- [4] D. H. Kim and S. Shin, “Local path planning using a new artificial potential function configuration and its analytical design guidelines,” Advanced Robotics, Vol.20, No.1, pp. 115-135, 2006.
- [5] T. Yamakawa, “Development of path planning algorithm using potential field based on two fixed-angle laser scanners,” SICE Annual Conf., pp. 892-895, Aug. 18-21, 2010.
- [6] E. Rimon and D. E. Koditschek, “Exact robot navigation using artificial potential functions,” IEEE Trans. on Robotics and Automation, Vol.8, No.5, pp. 501-518, 1992.
- [7] H. Yokoi, T. Mizuno, M. Takita, and Y. Kakazu, “Obstacle Avoidance Using Vibrating Potential Method (Self-Organization in a Narrow Path),” J. of Robotics and Mechatronics, Vol.8, No.4, pp. 356-363, 1996.
- [8] L. Yin and Y. Yin, “An improved potential field method for mobile robot path planning in dynamic environments,” 7th World Congress on Intelligent Control and Automation 2008 (WCICA 2008), pp. 4847-4852, 2008.
- [9] M. Uchida, S. Yokoyama, and H. Ide, “Development of Autonomous Mobile Robot for Obstacle Avoidance,” J. of Robotics and Mechatronics, Vol.5, No.5, pp. 481-486, 1993.
- [10] M. Uchida and H. Ide, “Path Planning by SPM Method for Autonomous Robot,” J. of Robotics and Mechatronics, Vol.6, No.1, pp. 55-57, 1994.
- [11] N. Sariff and N. Buniyamin, “An Overview of Autonomous Mobile Robot Path Planning Algorithms,” 4th Student Conf. on Research and Development 2006 (SCOReD 2006), pp. 183-188, 2006.
- [12] M. Kitamura, Y. Yasuoka, T. Suzuki, Y. Amano, and T. Hashizume, “Path Planning for Autonomous Vehicles Using QZSS and Satellite Visibility Map,” J. of Robotics and Mechatronics, Vol.25, No.2, pp. 400-407, 2013.
- [13] J. Ilari and C. Torras, “2D Path Planning: A Configuration Space Heuristic Approach,” The Int. J. of Robotics Research, Vol.9, No.1, pp. 75-91, 1990.
- [14] M. Seder and I. Petrovic, “Dynamic window based approach to mobile robot motion control in the presence of moving obstacles,” ICRA, Vol.7, pp. 1986-1991, 2007.
- [15] M. Zulkifli, “Autonomous ground vehicle design,integration and control for the IGVC Competition,” IEEE Mechatronics and its Applications, Vol.1, No.6, 2012.
- [16] K. Takahashi, “Development of laser range finder-implemented JAUS-compliant local pose component,” SICE Annual Conf., pp. 634-639, Aug. 20-23, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.