Paper:
Super Multi-Joint Manipulator by Using Creased Plate and Pneumatic Actuators Arranged Antagonistically
Shunon Kikuchi*, Yasuyuki Yamada**, Ryoichi Higashi*, and Toshio Morita*
*Keio University
3-14-1 Hiyoshi, Kouhoku, Yokohama, Kanagawa 223-8522, Japan
**Department of Mechanical and Aerospace Engineering, Tokyo Institute of Technology
2-12-1 Ookayama, Meguro-ku, Tokyo 152-8552, Japan

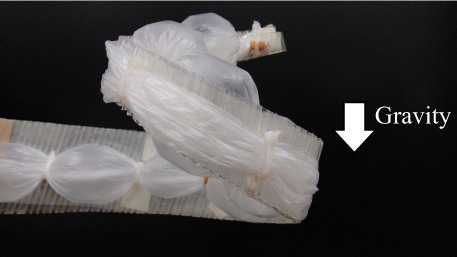
The manipulator when air flowed in
- [1] N. Giri and I. Walker, “Continuum robots and underactuated grasping,” Proc. ASME Int. Work. Underactuated Grasping, pp. 111-116, 2010.
- [2] A. Kapadia and I. D. Walker, “Task-space Control of Extensible Continuum Manipulators,” Proc.IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1087-1092, 2011.
- [3] G. S. Chirikjian, “Hyper-redundant manipulator dynamics a continuum approximation,” Advanced Robotics, Vol.9, No.3, pp. 217-243, 1995.
- [4] W. McMahan, V. Chitrakaran, M. Csencsits, D. Dawson, and I. D. Walker, “Field Trials and testing of the OctArm Continuum Manipulator,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 2336-2341, 2006.
- [5] G. Salvietti, H. X. Zhang, J. Gonzalez-Gomez, D. Prattichizzo, and J. W. Zhang, “Task Priority Grasping and Locomotion Control of Modular Robot,” Proc. IEEE Int. Conf. on Robotics and Biomimetics, pp. 1069-1074, 2009.
- [6] W. McMahan and I. D. Walker, “Octopus-Inspired Grasp-Synergies for Continuum Manipulator,” Proc. IEEE Int. Conf. on Robotics and Biomimetics, pp. 945-950, 2009.
- [7] M. W. Hannan and I. D. Walker, “Analysis and initial experiments for a novel elephant’s trunk robot,” Proc.2000 IEEE/RSJ Int. Conf. Intelligent Robots and Systems, Vol.1, pp. 330-337, 2000.
- [8] K. Asano, M. Obama, Y. Arimura, M. Kondo, and Y. Hitomi, “Multijoint Inspection Robot,” Proc. IEEE Trans. on Industrial Electronics, Vol.IE-30, No.3, pp. 9-16, 1990.
- [9] M. A. Shugen, S. Hirose, and K. Yokoshima, “Moray drive of multi-joint manipulator,” J. of the Robotics Society of Japan, Vol.8, No.1, pp. 237-242, 1995 (in Japanese).
- [10] M. A. Shugen and S. Hirose, “Dynamic Control Approaches for a Coupled Tendon-Driven Manipulator,” Trans. of the Japan Society of Mechanical Engineers (Part C), Vol.61, No.591, pp. 4359-4364, 1995 (in Japanese).
- [11] T. Noritsugu, “Pneumatic actuators,” J. of the Robotics Society of Japan, Vol.15, No.3, pp. 355-359, 1997 (in Japanese).
- [12] K. Kuribayashi and S. Shimizu, “A millimeter-Sized Robot Using SMA and Its Control,” J. of the Robotics and Mechatronics, Vol.7, No.6, pp. 449-457, 1995.
- [13] E. Yoshida, S. Murata, S. Kokaji, K. Tomita, and H. Kurokawa, “Micro Self-reconfigurable Modular Robot Using Shape Memory Alloy,” J. of the Robotics and Mechatronics, Vol.13, No.2, pp. 212-219, 2001.
- [14] H. Kimura, M. Kataoka, S. Suzuki, D. Akimoto, and N. Inoue, “A Flexible Robotic Arm with Hydraulic Skeleton,” J. of Advanced Mech. Design, Systems, and Manufact., Vol.7, No.6, pp. 1107-1120, 2012.
- [15] Y. Nishioka, M. Uesu, H. Tsuboi, and S. Kawamura, “Proposal of an Extremely Lightweight Soft Actuator using Plastic Films with a Pleated Structure,” Proc. of the 19th Int. Conf. on Mechatronics and Machine Vision in Practice (M2VIP2012), pp. 491-496, 2012.
- [16] J. Denavit and R. S. Hartenberg, “A Kinematic Notation for Lower-Pair mechanisms Based on Matrices,” ASME J. of Applied Mechanics, pp. 215-221, 1955.
- [17] CKD corporation, Technical manual, Speed controller, p. 664.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.