Paper:
Complement Method for Obstructed Area on Images of Multiple Cameras Mounted Behind Crawler Shoe
Kenichi Tokuda*1, Tatsuya Hirayama*2, Tetsuya Kinugasa*3, Takafumi Haji*4, Hisanori Amano*5, and Kazunori Yasuda*1
*1Wakayama University
930 Sakaedani, Wakayama 640-8510, Japan
*2Shimano Inc.
3-77 Oimatsu-cho, Sakai-ku, Sakai city, Osaka 590-8577, Japan
*3Okayama University of Science
1-1 Ridaicho, Kita ward, Okayama city, Okayama 700-0005, Japan
*4National Institute of Technology, Matsue College
14-4 Nishiikuma-cho, Matsue city, Shimane 690-0865, Japan
*5National Research Institute of Fire and Disaster
4-35-3 Jindaiji Higasimachi, Chofu city, Tokyo 182-8508, Japan

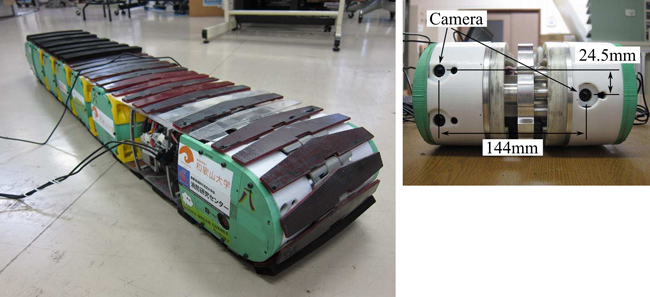
Camera system of FMT (RT-04)
- [1] J. Ma, Y. Zhang, Y. Nam, A. Cichocki, and F. Matsuno, “EOG/ERP Hybrid Human-Machine Interface for Robot Control,” Proc. IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 859-864, 2013.
- [2] T. Kinugasa, Y. Otani, T. Haji, K. Yoshida, K. Osuka, and H. Amano, “A Proposal of Flexible Mono-tread Mobile Track,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1642-1647, 2008.
- [3] T. Haji, T. Kinugasa, S. Araki, D. Hanada, K. Yoshida, H. Amano, R. Hayashi, K. Tokuda, and M. Iribe, “New Body Design for Flexible Mono-Tread Track: Layered Structure and Passive Retro-Flexion,” J. of Robotics and Mechatronics, Vol.26, No.4, pp. 460-468, 2014.
- [4] M. Arai, Y. Tanaka, S. Hirose, H. Kuwahara, and S. Tsukui, “Development of Souryu-IV and Souryu-V: Serially connected crawler vehicles for in-rubble searching operations,” J. of Field Robotics, Vol.25, No.1-2, pp. 31-65, 2008.
- [5] A. Yamashita, T. Harada, T. Kaneko, and K. T. Miura, “Virtual Wiper – Removal of Adherent Noises from Images of Dynamic Scenes by Using a Pan-Tilt Camera –,” Advanced Robotics, Vol.19, No.3, pp. 295-310, 2005.
- [6] A. Yamashita, Y. Tanaka, and T. Kaneko, “Removal of Adherent Waterdrops from Images Acquired with Stereo Camera,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 400-405, 2005.
- [7] A. Yamashita, I. Fukuchi, and T. Kaneko, “Noises Removal from Image Sequences Acquired with Moving Camera by Estimating Camera Motion from Spatio-Temporal Information,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3794-3801, 2009.
- [8] S. You, R. T. Tan, R. Kawakami, and K. Ikeuchi, “Adherent raindrop detection and removal in video,” Proc. of IEEE Computer Society Conf. on Computer Vision and Pattern Recognition, 2013.
- [9] T. Modegi, T. Inazawa, T. Chiba, and C. Kobayashi, “Small object recognition techniques based on structured template matching for high-resolution satellite images,” Proc. of SICE Annual Conf. 2008, pp. 2168-2173, 2008.
- [10] C. D. Kuglin and D. C. Hines, “The Phase Correlation Image Alignment Method,” Proc. of Int. Conf. on Cybernetics and Society, pp. 163-165, 1975.
- [11] K. Kobayashi, H. Najima, T. Aoki, M. Kawamata, and T. Higuchi, “Principles of Phase Only Correlatio and Its Applications,” Technical Report of The Institute of Image Information and Television Engineers, Vol.20, No.41, pp. 1-6, 1996 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.