Paper:
Fast Motion of Path Tracking Task with Constant Hand Speed Using Redundant Manipulator
Kousuke Okabe and Yasumichi Aiyama
University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8573, Japan

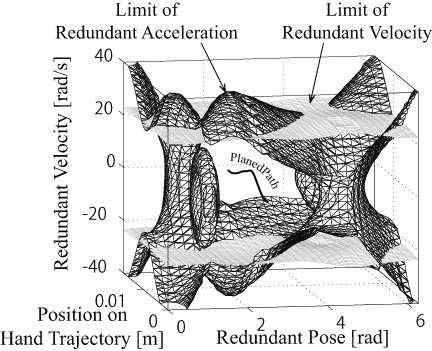 Limits and a motion in state space
Limits and a motion in state space- [1] K. Tomiyama, “Trend of Advanced Technology in Dispenser,” Trans. of The Japan Institute of Electronics Packaging, Vol.7, No.6, pp. 501-505, 2004.
- [2] I. Shimano, “The Dispensing Technology That Is Found for High-Density Jisso,” Trans. of The Japan Institute of Electronics Packaging, Vol.11, No.6, pp. 451-455, 2008.
- [3] X. Zhang and I. Todo, “Control of Sealing Robot Using Saem Position Detection Method Based on Integration of Range and Gray-Scale Images,” Trans. of the Japan Society of Mechanical Engineers, C, Vol.60, No.577, pp. 238-244, 1994.
- [4] K. Arakawa, T. Kakizaki, and S. Omyo, “High-Speed Seam Feature Detection for Robotic Sealing,” J. of the Robotics Society of Japan, Vol.16, No.3, pp. 376-383, 1997.
- [5] T. Kakizaki, Y. Yanagihara, K. Arakawa, A. Umeno, K. Mochizuki, and S. Omyo, “Development of a High-speed Visual Sensing System for Robotic Seam-Tracking in Automobile Body Sealing,” Trans. of the Japan Society of Mechanical Engineers, C, Vol.64, No.628, pp. 207-2014, 1998.
- [6] J. Huang, I. Todo, and T. Tokiwa, “Real Time Trajectory Generation Method and Control of a Searing Robot,” Trans. of the Japan Society of Mechanical Engineers, C, Vol.66, No.648, pp. 199-206, 2000.
- [7] Y. Feng, X. Yu, and Z. Man, “Adaptive Fast Terminal Sliding Mode Tracking Control of Robotic Manipulator,” Proc. of the 40th IEEE Conf. of Decision and Control, FrA09-4, pp. 4021-4026, 2001.
- [8] L. Hu, P. Zhao, and Z. Lu, “Trajectory Tracking Control Based on Global Fast Terminal Sliding Mode for 2-DOF Manipulator,” The 2nd Int. Conf. on Intelligent Control and Information Processing, pp. 65-69, 2011.
- [9] C. S. Liu and H. Peng, “Disturbance Observer Based Tracking Control,” J. of Dynamics Systems Measurement and Control, Vol.122, pp. 332-335, 2000.
- [10] J. E. Bobrow, S. Dubowsky, and J. S. Gibson, “Time-Optimal Control of Robotic Manipulators Along Specified Paths,” Int. J. of Robotics Research, Vol.4, No.3, pp. 3-17, 1985.
- [11] K. G. Shin and N. D. Mckay, “Minimum-Time Control of Robotic Manipulators with Geometric Path Constraints,” IEEE Trans. on Automatic Control, Vol.AC-30, No.6, pp. 531-541, 1985.
- [12] S. Ma and M. Watanabe, “Time Optimal Path-Tracking Control of Kinematically Redundant Manipulators,” JSME Int. J., Series C, Vol.47, No.2, pp. 582-590, 2004.
- [13] M. Galicki, “Time-Optimal Controls of Kinematically Redundant Manipulators with Geometric Constraints,” IEEE Trans. on Robotics and Automation, Vol.16, No.1, pp. 89-93, 2000.
- [14] Y. Nakamura and H. Hanafusa, “Optimal Redundancy Control of Articulated Robot Arms,” Trans. of the Society of Instrument and Control Engineers, Vol.21, No.5, pp. 501-507, 1985.
- [15] P. H. Chang, “A Closed-Form Solution for Inverse Kinematics of Robot Manipulators with Redundancy,” IEEE J. of Robotics and Automation, Vol.RA-3, No.5, pp. 393-403, 1987.
- [16] K. C. Park, P. H. Chang, and S. Lee, “Analysis and Control of Redundant Manipulator Dynamics Based on an Extended Operational Space,” Robotica, Cambridge University Press, Vol.19, pp. 649-662, 2001.
- [17] S. Lee and A. K. Bejczy, “Redundant Arm Kinematic Control Based on Parameterization,” Proc. of the 1991 IEEE Int. Conf. on Robotics and Automation, pp. 458-465, 1991.
- [18] K. Osuka and H. Mayeda, “A New Identification Method for Manipulators,” Trans. of the Society of Instrument and Control Engineers, Vol.22, No.6, pp. 637-643, 1986.
- [19] T. Yoshikawa, “Foundations of Robot Control,” Corona Publishing Co., Ltd., 1988.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.