Paper:
Nonlinear Perfect Tracking Control for a Robot Arm with Uncertainties Using Operator-Based Robust Right Coprime Factorization Approach
Aihui Wang*, Dongyun Wang*, Haiquan Wang*, Shengjun Wen*, and Mingcong Deng**
*School of Electric and Information Engineering, Zhongyuan University of Technology
41 Zhongyuan Road, Zhengzhou 450007, China
**Graduate School of Engineering, Tokyo University of Agriculture and Technology
2-24-16 Nakacho, Koganei, Tokyo 184-8588, Japan

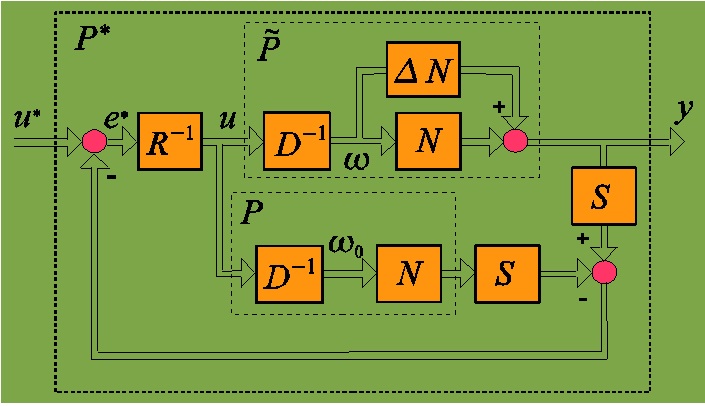 Plant uncertainties compensation
Plant uncertainties compensation- [1] F. L. Lewis, D. M. Dawson, and C. T. Abdallah, “Robot Manipulator Control: Theory and Practice,” Marcel Dekker, Inc., 2004.
- [2] N. Hogan, “Impedance control of industrial robots,” Robotics & Computer-Integrated Manufacturing, Vol.1, No.1, pp. 97-113, 1984.
- [3] R. Richardson, M. Brown, B. Bhakta, and M. Levesley, “Impedance control for a pneumatic robot-based around pole-placement, joint space controllers,” Control Engineering Practice, Vol.13, No.3, pp. 291-303, 2005.
- [4] S. Islam and X. Liu, “Robust sliding mode control for robot manipulators,” IEEE Trans. on Industrial Electronics, Vol.58, No.6, pp. 2444-2453, 2011.
- [5] C. S. Kim, E. J. Mo, S. M. Han, M. S. Jie, and K. W. Lee, “Robust visual servo control of robot manipulators with uncertain dynamics and camera parameters,” Int. J. of Control, Automation, and Systems, Vol.8, No.2, pp. 308-313, 2010.
- [6] A. A. Ata, “Optimal trajectory planning of manipulators: a review,” J. of Engineering Science and Technology, Vol.2, No.1, pp. 32-54, 2007.
- [7] G. Simmons and Y. Demiris, “Optimal robot arm control using the minimum variance model,” J. of Robotic Systems, Vol.22, No.11, pp. 677-690, 2005.
- [8] V. Arakelian, J. L. Baron, and P. Mottu, “Torque minimisation of the 2-DOF serial manipulators based on minimum energy consideration and optimum mass redistribution,” Mechatronics, Vol.21, No.1, pp. 310-314, 2011.
- [9] S. Devasia, “Nonlinear minimum-time control with pre- and post-actuation,” Automatica, Vol.47, No.7, pp. 1379-1387, 2011.
- [10] P. Tomei, “Adaptive PD controller for robot manipulators,” IEEE Trans. on Robotics and Automation, Vol.7, No.4, pp. 565-570, 1991.
- [11] C. Chiena and A. Tayebib, “Further results on adaptive iterative learning control of robot manipulators,” Automatica, Vol.44, No.3, pp. 830-837, 2008.
- [12] H. Le, S. Lee, and C. Lee, “Integration model reference adaptive control and exact linearization with disturbance rejection for control of robot manipulators,” Int. J. of Innovative Computing, Informa-tion and Control, Vol.7, No.6, pp. 3255-3268, 2011.
- [13] K. Althoefer, B. Krekelberg, D. Husmeier, and L. Seneviratne, “Reinforcement learning in a rule-based navigator for robotic manipulators,” Neurocomputing, Vol.37, No.1-4, pp. 51-70, 2011.
- [14] C. T. Freeman, P. L. Lewin, E. Rogers, and J. D. Ratcliffe, “Iterative learning control applied to a gantry robot and conveyor system,” Trans. of the Institute of Measurement and Control, Vol.32, No.3, pp. 251-264, 2010.
- [15] N. Kumara, V. Panwarb, N. Sukavanamc, S. P. Sharmac, and J. H. Borma, “Neural network-based nonlinear tracking control of kinematically redundant robot manipulators,” Mathematical and Computer Modelling, Vol.53, No.9-10, pp. 1889-1901, 2011.
- [16] T. Sun, H. Pei, Y. Pan, H. Zhou, and C. Zhang, “Neural network-based sliding mode adaptive control for robot manipulators,” Neurocomputing, Vol.74, No.14-15, pp. 2377-2384, 2011.
- [17] C. C. Cheng, S. H. Chien, and F. C. Shih, “Design of robust adaptive variable structure tracking controllers with application to rigid robot manipulators,” IET Control Theory & Applications, Vol.4, No.9, pp. 1655-1664, 2010.
- [18] F. Moldoveanu, V. Comnac, D. Floroian, and C. Boldisor, “Trajectory tracking control of a two-link robot manipulator using variable structure system theory,” Control Engineering and Applied Informatics, No.7, No.3, pp. 56-62, 2005.
- [19] T. Henmi, T. Ohta, M. Deng, and A. Inoue, “Tracking control of a twolink planar manipulator using nonlinear model predictive control,” Int. J. of Innovative Computing, Information and Control, Vol.6, No.7, pp. 2977-2984, 2010.
- [20] C. P. Tan, X. Yu, and Z. Man, “Terminal sliding mode observers for a class of nonlinear systems,” Automatica, Vol.46, No.8, pp. 1401-1404, 2010.
- [21] S. Islam and X. P. Liu, “Robust sliding mode control for robot manipulators,” IEEE Trans. on Industrial Electronics, Vol.58, No.6, pp. 2444-2453, 2011.
- [22] W. E. Dixon, M. S. de Queiroz, F. Zhang, and D. M. Dawson, “Tracking control of robot manipulators with bounded torque inputs,” Robotica, Vol.17, No.2, pp. 121-129, 1999.
- [23] Y. Oh and W. K. Chung, “Disturbance-observer-based motion control of redundant manipulators using inertially decoupled dynamics,” IEEE Trans. on Mechatronics, Vol.4, No.2, pp. 133-146, 1999.
- [24] P. Herman and D. Franelak, “Robust tracking controller with constraints using generalized velocity components for manipulators,” Trans. of the Institute of Measurement and Control, Vol.30, No.2, pp. 101-113, 2008.
- [25] R. Fukui, H. Morishita, and T. Sato, “Experimental comparison of two ceiling hanging mobile robots through real prototypes development,” J. Robotics and Mechatronics, Vol.26, No.1, pp. 40-50, 2014.
- [26] X. Dai, Z. Yao, and Y. Zhao, “A discrete adaptive auction-based algorithm for task assignments of multi-robot systems,” J. Robotics and Mechatronics, Vol.26, No.3, pp. 369-376, 2014.
- [27] S. Hashimoto, A. Ishida, M. Inami, and T. Igarashi, “TouchMe: an augmented reality interface for remote robot control,” J. Robotics and Mechatronics, Vol.25, No.3, pp. 527-537, 2014.
- [28] A. Wang and M. Deng, “Robust nonlinear control design to a manipulator based on operator based approach,” ICIC Express Letters, Vol.6, No.3, pp. 617-623, 2012.
- [29] A. Wang and M. Deng, “Robust nonlinear multivariable tracking control design to a manipulator with unknown uncertainties using operator-based robust right coprime factorization,” Trans. of the Institute of Measurement and Control, Vol.35, No.6, pp. 788-797, 2013.
- [30] A. Wang and M. Deng, “Operator-based robust nonlinear tracking control for a human multi-joint arm-like manipulator with unknown time-varying delays,” Applied Mathematics & Information Sciences, Vol.6, No.3, pp. 459-468, 2012.
- [31] A. Wang, M. Deng, and D. Wang, “Operator-based robust control design for a human arm-like manipulator with time-varying delay measurements,” Int. J. of Control, Automation, and Systems, Vol.11, No.6, pp. 1112-1121, 2013.
- [32] A. Banos, “Stabilization of nonlinear systems based on a generalized Bezout identity,” Automatica, Vol.32, No.4, pp. 591-595, 1996.
- [33] M. Deng, A. Inoue, and K. Ishikawa, “Operator-based nonlinear feedback control design using robust right coprime factorization,” IEEE Trans. on Automatic Control, Vol.51, No.4, pp. 645-648, 2006.
- [34] N. Bu and M. Deng, “System design for nonlinear plants using operator-based robust right coprime factorization and isomorphism,” IEEE Trans. on Automatic Control, Vol.56, No.4, pp. 952-957, 2011.
- [35] M. Deng, S. Bi, and A. Inoue, “Robust nonlinear control and tracking design for multi-input multi-output nonlinear perturbed plants,” IET Control Theory & Applications, Vol.3, No.9, pp. 1237-1248, 2009.
- [36] T. Yoshikawa, “Foundations of robotics: analysis and control,” The MIT Press, 1990.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.