Development Report:
Satellite, Planetary or Terrestrial Subsurface Explorer Robot Based on Earthworm Locomotion
Hayato Omori*, Hiroyuki Kitamoto*, Asuka Mizushina*,
Taro Nakamura*, and Takashi Kubota**
*Department of Precision Mechanics, Faculty of Science and Engineering, Chuo University, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
**Japan Aerospace Exploration Agency, 3-1-1 Yoshinodai, Chuo-ku, Sagamihara-shi, Kanagawa 252-5210, Japan

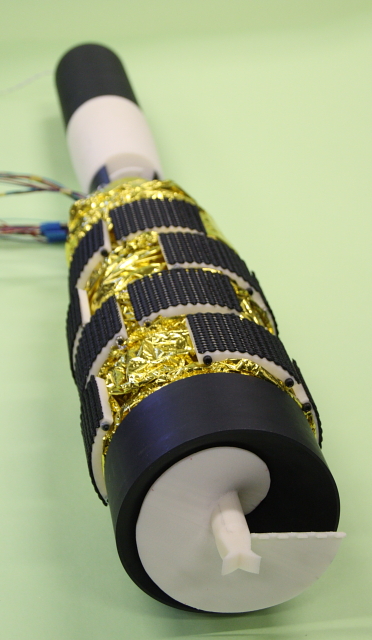
Subsurface explorer robot
- [1] K. Iizuka et al., “Development of a Small, Lightweight Rover with Elastic Wheels for Lunar Exploration,” J. Robot. Mechatron., Vol.24, No.6, pp. 1031-1039, 2012.
- [2] H. Omori et al., “Development of a Novel Bio-Inspired Planetary Subsurface Explorer: Initial Experimental Study by Prototype Excavator With Propulsion and Excavation Units,” IEEE Trans. Mechatron., Vol.18, No.2, pp. 459-470, 2013.
- [3] H. Kitamoto et al., “Propulsion Mechanism for a Lunar Subterranean Excavator Using Peristaltic Crawling,” J. Robot. Mechatron., Vol.25, No.3, pp. 466-475, 2013.
- [4] A. Mizushina et al., “A discharging mechanism for a lunar subsurface explorer with the peristaltic crawling mechanism,” in Proc. 6th Int. Conf. Rec. Adv. Space Technol., Istanbul, Turkey, pp. 955-960, 2013,
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.