Development Report:
Autonomous Mobile Robot MAUV – Mission Achievement on Tsukuba Challenge 2011, 12 and 13 –
Naoki Akai, Kazumichi Inoue, Sam Ann Rahok,
Masatoshi Shinohara, and Koichi Ozaki
Department of Mechanical and Intelligent Engineering, Utsunomiya University, 7-1-2 Yoto, Utsunomiya-shi, Tochigi 321-8585, Japan

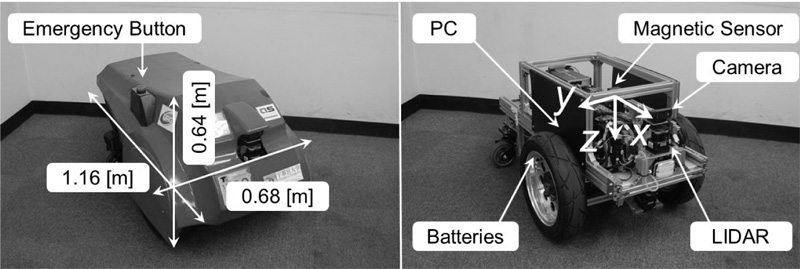 Autonomous mobile robot “MAUV”
Autonomous mobile robot “MAUV”- [1] S. A. Rahok et al., “Navigation Using an Environmental Magnetic Field for Outdoor Autonomous Mobile Robots,” Advanced Robotics, Vol.26, Nos.3-4, pp. 1751-1771, 2011.
- [2] N. Akai et al., “Autonomous Navigation Based on Magnetic and Geometric Landmarks on Environmental Structure in Real World,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 158-165, 2014.
- [3]
Supporting Online Materials:[a] “Movie of autonomous running by MAUV in TC2011”
http://www.youtube.com/watch?v=NYgnzBSySUg [Accessed June 12, 2014]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.