Paper:
Driver Speed Control Modeling for Predictive Braking Assistance System Based on Risk Potential in Intersections
Pongsathorn Raksincharoensak*, Yuta Akamatsu**, Katsumi Moro*,
and Masao Nagai***
*Department of Mechanical Systems Engineering, Faculty of Engineering, Tokyo University of Agriculture and Technology, 2-24-16 Naka-cho, Koganei, Tokyo 184-8588, Japan
**Department of Industrial Technology and Innovation, Faculty of Engineering, Tokyo University of Agriculture and Technology, 2-24-16 Naka-cho, Koganei, Tokyo 184-8588, Japan
***Japan Automobile Research Institute, 1-1-30 Shibadaimon, Minato, Tokyo 105-0012, Japan

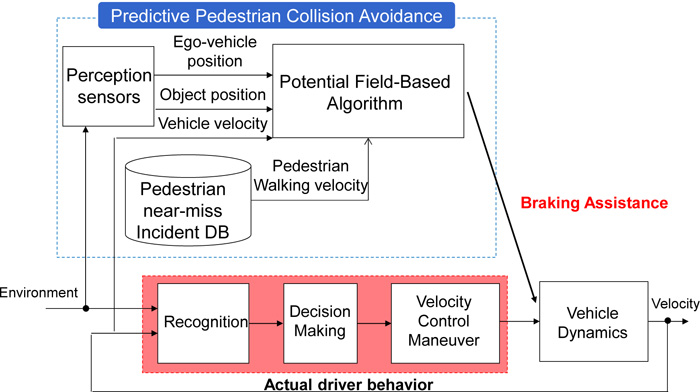 Predictive braking assistance system
Predictive braking assistance system- [1] National Police Agency, “The White Paper on Police 2011 (Digest edition) Chapter 3 Ensuring Safe and Comfortable Transportation,” pp. 31-33, 2011.
- [2] E. Coelingh, A. Eidehall, and M. Bengtsson, “Collision Warning with Full Auto Brake and Pedestrian Detection – a practical example of Automatic Emergency Braking,” Proc. of IEEE ITSC’10, pp. 155-160, 2010.
- [3] U. Franke, S. Gehrig, and C. Rabe, “Hazard Detection Faster than the Human,” ATZ Technology, Vol.114, No.07-08/2012, pp. 52-55, 2012.
- [4] H. Hayashi, R. Inomata, R. Fujishiro, Y. Ouchi, K. Suzuki, and T. Nanami, “Development of Pre-Crash Safety System with Pedestrian Collision Avoidance Assist,” Proc. of ESV Conf., Korea, Paper Number 13-0271, 2013.
- [5] C. G.Keller, T.Dang,H. Fritz,A. Joos, C. Rabe, andD. M.Gavrila, “Active Pedestrian Safety by Automatic Braking and Evasive Steering,” IEEE Trans. on Intelligent Transportation Systems, Vol.12, No.4, pp. 1292-1304, 2011.
- [6] S. Makabe, “Active Safety System New EyeSight Version 2,” J. of Society of Automotive Engineers of Japan, Vol.66, No.3, pp. 88-93, 2012.
- [7] S. Schramm and F. Roth, “Method to Assess the Effectiveness of Active Pedestrian Protection Safety Systems,” Proc. of ESV Conf. 2009, Paper No.09-0398, 2009.
- [8] O. Khatib, “Real-Time Obstacle Avoidance for Manipulators and Mobile Robots,” Int. J. of Robotics Research, Vol.5, No.1, pp. 90-98.
- [9] M. Nagai, Y. Michitsuji, M. Kamata, M. Shino, and K. Maeda, “Research on Incident Analysis Using Drive Recorder Part 2: toward Active Safety Assessment,” Proc. of FISITA 2006, Yokohama, Japan, No.F2006V202, 2006.
- [10] P. Raksincharoensak, D. Hasegawa, I. Iwasawa, and Y. Michitsuji, “Hazard-Anticipatory Driver Modeling for Preventing Pedestrian Collisions in Unsignalized Intersection,” Proc. of JSAE Annual Congress (Spring), No.3-12, pp. 7-12, 2012.
- [11] Nikkei Publishings, “Zero-Crash Cars Up to 60 km/h,” Nikkei Automotive Technology, pp. 60-65, 2011.
- [12]
Supporting Online Materials:[a] Cabinet office, Government of Japan, “White Paper of Traffic Safety,” 2014.
http://www8.cao.go.jp/koutu/taisaku/h26kou_haku/index_gaiyou_pdf.html [Accessed June 30, 2014]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.