Development Report:
Impedance Control of Two d.o.f. CPM Device for Elbow Joint
Nobutomo Matsunaga, Shota Miyaguchi, Hiroshi Okajima,
and Shigeyasu Kawaji
Department of Computer Science and Electrical Engineering, Kumamoto University, 2-39-1 Kurokami, Cyuou-ku, Kumamoto 860-8555, Japan

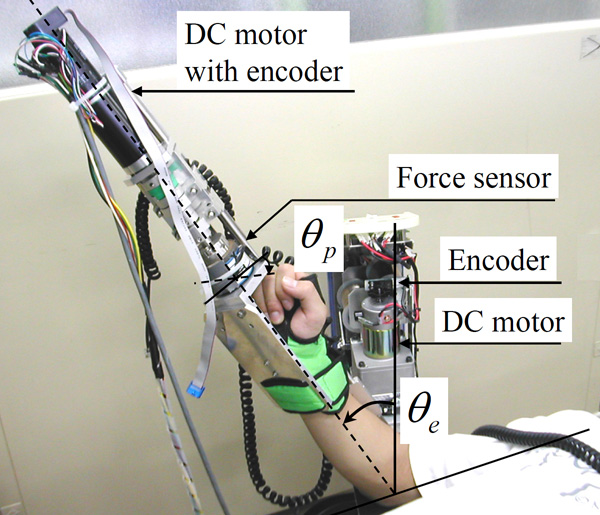
Two d.o.f. CPM device
- [1] S. Miyaguchi et al., “Impedance Control of Two d.o.f. CPM Device for Elbow Joint,” Mechatronic Systems, Applications, A. Miella et al. (Eds.), In tech, pp. 213-226, 2010.
- [2] S. Miyaguchi et al., “Control Scheme of Two d.o.f. CPM Device to Suppress the Extension of Ligament of the Elbow,” Biomedical Signal Processing and Control, doi:10.1016/j.bspc.2009.02.007, 2009.
- [3] S.Miyaguchi et al., “Trajectory Generation of CPM Device for Upper Limbs Considering Constraint Caused by Joint Disorder,” J. of Robotics and Mechatronics, Vol.22, No.2, pp. 239-246, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.