Development Report:
Autonomous Underwater Vehicle “Tuna-Sand” for Image Observation of the Seafloor at a Low Altitude
Yuya Nishida*1, Tamaki Ura*2, Takeshi Nakatani*3,
Takashi Sakamaki*1, Junichi Kojima*4, Yuzuru Itoh*5,
and Kangsoo Kim*6
*1Institute of Industrial Science, The University of Tokyo, 4-6-1 Komaba, Meguro, Tokyo, Japan
*2Kyushu Institute of Technology, 2-4 Hibikino, Wakmatsu, Kitakyushu, Fukuoka, Japan
*3Japan Agency for Marine-Earth Science and Technology, 2-15 Natsushima, Yokosuka, Kanagawa, Japan
*4KDDI R&D Laboratories, 2-1-15 Ohara, Fujimino, Saitama, Japan
*5Ocean Engineering Research, Inc., 503 Koshin Building, 1-28-3 Takadanobaba, Shinjuku, Tokyo, Japan
*6National Maritime Research Institute, 6-38-1 Shinkawa, Mitaka, Tokyo, Japan

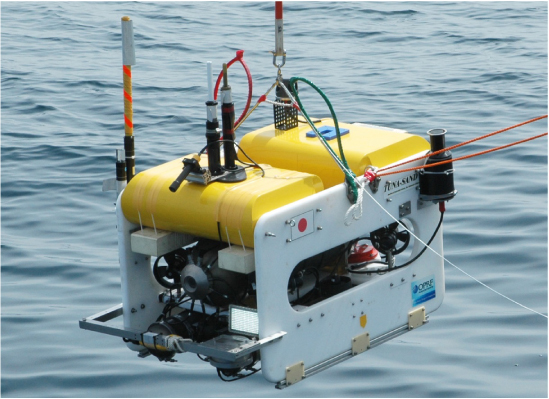 AUV Tuna-Sand
AUV Tuna-Sand- [1] T. Nakatani et al., “D Visual Modeling of Hydrothermal Chimneys using a Rotary Laser Scanning System,” Proc. of the Int. Symposium on Underwater Technology, pp. 1-5, 2011.
- [2] T. Nakatani et al., “AUV TUNA-SAND and its Exploration Hydrothermal Vents at Kagoshima Bay,” Proc. of OCEANS’08, pp. 1-5, 2008.
- [3] T. Sulin et al., “Estimation of the Hydrodynamic Coefficients of the Complex-shaped Autonomous Underwater Vehicle TUNA-SAND,” J. of Marine Science and Technology, Vol.14, No.2, pp. 373-386, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.