Paper:
Deformable Anchor Ball for Thrown Referring to Octopus Suckers
Hideyuki Tsukagoshi, Kazutaka Fuchigami, Eyri Watari,
and Ato Kitagawa
Tokyo Institute of Technology, 2-12-1 Ohokayama, Meguro-ku, Tokyo 152-8552, Japan

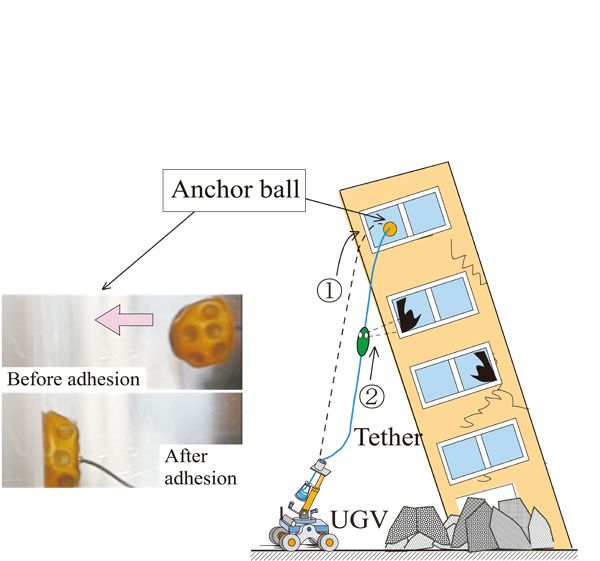 Image of Anchor Ball
Image of Anchor Ball- [1] N. Asano and S. Hirose, “Development of Casting Hook with Teleoperated Releasing Function – Consideration of Electric and Pneumatic Tele-driving Mechanism –,” Proc. of the 2007 JSME Conf. on Robotics and Mechatronics, 2A1-J06, 2007 (in Japanese).
- [2] H. Arisumi, K. Yokoi, and K. Komoriya, “Casting manipulation – Midair control of a gripper by impulsive force,” IEEE Trans. Robot., Vol.24, No.2, pp. 402-415, 2008.
- [3] K. Fuchigami, E. Watari, H. Tsukagoshi, and A. Kitagawa, “Development of Casting-Type Adhesive Object to Aid Rescue Operations inside Dangerous Buildings,” Proc. of Robotics and Mechatronics Conf., 2A1-J11, 2011 (in Japanese).
- [4] P. E. Rybski, I. Burt, T. Dahkin et. al., “System Architecture for Versatile Autonomos and Teleoperated Control of Multiple Miniature Robot,” Proc. of the 2001 IEEE Int. Conf. on Robotics & Automation, 2001.
- [5] Y. Mori, H. Tsukagoshi, and A. Kitagawa, “Fluid Powered Ropeway: Self-propelled Probe Sliding Along Flexible Tube,” J. of Robotics and Mechatronics, Vol.23, No.2, pp. 215-224, 2011.
- [6] S. Kim, M. Spenko, S. Trujillo, B. Heyneman, D. Santos, and M. R. Cutkosky, “Smooth Vertical Surface Climbing With Directional Adhesion,” IEEE Trans. on Robotics, Vol.24, No.1, pp. 65-74, 2008.
- [7] H. Prahlad, R. Pelrine, S. Stanford, J. Marlow, and R. Kornbluh, “Electroadhesive robots – wall climbing robots enabled by a novel, robust, and electrically controllable adhesion technology,” IEEE Int. Conf. on Robotics and Automation 2008, pp. 3028-3033, 2008.
- [8] M. Kovac, J. Germann, C. Hürzeler, R.Y. Siegwart, and D. Floreano, “A perching mechanism for micro aerial vehicles,” J. of Micro-Nano Mech., Vol.5, pp. 77-91, 2009.
- [9] G. D. Wile, K. A. Daltorio, E. D. Diller, L. R. Palmer, S. N. Gorb, R. E. Ritzmann, and R. D. Quinn, “Screenbot: walking inverted using distributed inward gripping,” IEEE Int. Conf. on Robotics and automation, pp. 1513-1518, 2008.
- [10] W. Shen, J. Gu, and Y. Shen, “Permanent magnetic system design for the wall-climbing robot,” Applied Bionics and Biomechanics, Vol.3, No.3, pp. 151-159, 2006.
- [11] G. La Rosa, M. Messina, G. Muscato, and R. Sinatra, “A lowcost lightweight climbing robot for the inspection of vertical surfaces,” Mechatronics, Vol.12, No.1, pp. 71-96, 2002.
- [12] K. A. Daltorio, A. D. Horchler, S. N. Gorb, R. E. Ritzmann, and R. D. Quinn, “A small wall-walking robot with compliant, adhesive feet,” IEEE/RSJ Int. Conf. on intelligent robots and systems, pp. 3648-3653, 2005.
- [13] F. W. Grasso, “Sensational Sucker,” Scientific American, October 2010.
- [14] “Throwing-type adsorption ball,” Japanese patent application, No.2011-113877.
- [15] A. Nagakubo and S. Hirose, “Wall Gait: A Standard Gait for the Quadruped Wall-climbing Robot,” Proc. of Int. Conf. on Advanced Robotics, pp. 547-552, 1993.
- [16] K. Kuwahara, H. Tsukagoshi, and A. Kitagawa, “A soft finger with the function of attaching and holding internal organs referring to an octopus sucker,” Proc. of Robotics and Mechatronics Conf., 1A1-B14, 2013 (in Japanese).
- [17] S. Kikuchi, T. Takahashi, M. Suzuki, and S. Aoyagi, “Development of flexible vacuum gripper using suction cups for absorbing freeform object,” Proc. of Robotics and Mechatronics Conf., 1A1-K03, 2013 (in Japanese).
- [18] H. Tsukagoshi, H. Chiba, and A. Kitagawa, “Gel-type Sticky Mobile Inspector to Traverse on the Rugged Wall and Ceiling,” IEEE Int. Conf. on Robotics and Automation, FrA2.5, 2009.
- [19] E. Watari, H. Tsukagoshi, A. Kitagawa, and T. Tanaka, “Design of a Casting Device for a Tethered Payload Aiming Higher Access for Mobile Robots,” IEEE/ASME Trans. on Mechatronics, Vol.3, Issue 4, 041002-1/041002-11, 2011.
- [20] E. Watari, H. Tsukagoshi, and A. Kitagawa, “Methods for a Higher Casting of a Tethered Child Machine Using Pneumatic Cylinder,” J. of the Japan Fluid Power System Society, Vol.43, No.6, pp. 149-156, 2012.
- [21] H. Tsukagoshi, Y. Mori, and A. Kitagawa, “Fast Accessible Rescue Device by Using a Flexible Actuator,” Int. Conf. on Robotics and Automation, pp. 1175-1180, 2012.
- [22] Y. Mori, H. Tsukagoshi, and A. Kitagawa, “Fluid Powered Actuator Sliding Along Flexible Flat Tube (1st Report: Proposal of Λ-drive and Its Driving Analysis),” J. of the Japan Fluid Power System Society, Vol.41, No.5, pp. 98-105, 2010.
- [23]
Supporting Online Materials:[a] http://www.cm.ctrl.titech.ac.jp/study/anchor-ball/home.html [Accessed August 6, 2014]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.