Paper:
Small Search Robot Consisting of Plural Driving Wheels Connected by Flexible Shafts
Ryota Hayashi*, Kenta Nicho*, Yong Yu*,
Tetsuya Kinugasa**, and Hisanori Amano***
*Graduate School of Science and Engineering, Kagoshima University, 1-21-40 Korimoto, Kagoshima 890-0065, Japan
**Department of Mechanical Systems Engineering, Okayama University of Science, 1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
***National Research Institute of Fire and Disaster, 4-35-3 Jindaiji-Higashi-Machi, Chofu, Tokyo 182-0012, Japan

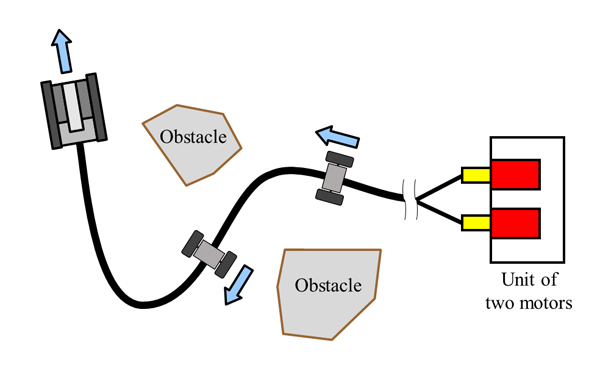 Search robot driven by flexible shafts
Search robot driven by flexible shafts- [1] T. Kinugasa, T. Akagi, T. Haji, K. Yoshida, H. Amano, R. Hayashi, M. Iribe, K. Tokuda, and K. Osuka, “Measurement System for Flexed Shape of Flexibly Articulated Mobile Track,” J. of Intelligent and Robotic Systems, Springer, Vol.75, Issue 1, pp. 87-100, 2013.
- [2] T. Kamegawa, R. Kuroki, M. Travers, and H. Choset, “Proposal of EARLI for the snake robot’s obstacle aided locomotion,” 2012 IEEE Int. Symposium on Safety, Security, and Rescue Robotics, pp. 1-6, 2012.
- [3] M. Arai, Y. Tanaka, S. Hirose, H. Kuwahara, and S. Tsukui, “Development of “Souryu-IV” and “Souryu-V”: Serially Connected Crawler Vehicles for in-Rubble Searching Operations,” J. of Field Robotics, Vol.25, No.1, pp. 31-65, 2008.
- [4] K. Tabata, A. Inaba, Q. Zhang, and H. Amano, “Development of a Transformational Mobile Robot to Search Victims under Debris and Rubbles,” IROS2004, CD-ROM, TA1-B3, 2004.
- [5] T. Oomichi, “Lessons of Nuclear Robot History,” J. of the Robotics Society of Japan, Vol.32, No.1, pp. 2-9, 2014 (in Japanese).
- [6] K. Nagatani, S. Kiribayashi, Y. Okada, S. Tadokoro, T. Nishimura, T. Yoshida, E. Koyanagi, and Y. Hada, “Redesign of Rescue Mobile Robot Quince,” 2011 IEEE Int. Symposium on Safety, Security, and Rescue Robotics, pp. 13-18, 2011.
- [7] S. Takahashi and T. Kaneda, “Development of a Search Robot for Rescue,” SICE System Integration Division Annual Conf. SI2002, Vol.1, pp. 59-60, 2002 (in Japanese).
- [8] S. Makita, F. Takemura, T. Doi, S. Tadokoro, and R. Tanaka, “Proposal Concerning Rescue Robots for Searching under Rubble (Mechanism of Locomotion and Test Course to Examine Their Ability,” SICE System Integration Division Annual Conf. SI2003, CD-ROM, 3j2-5, 2003 (in Japanese).
- [9] T. Doi, T. Sasahara, T. Kaneda, T. Umemoto, and Y. Yshitani, “Development of a Simple Search Device Driven by a Human-Powered Generator,” J. of Robotics and Mechatronics, Vol.17, No.3, pp. 342-351, 2005.
- [10] R. Hayashi, S. Tsujio, and Y. Yu, “Remote Control Mechanism for the Crawler-type Robot by use of Flexible Shafts,” J. of the Robotics Society of Japan, Vol.25, No.3, pp. 422-428, 2007 (in Japanese).
- [11] R. Hayashi, I. Nakamura, Y. Yu, and T. Kinugasa, H. Amano, “Torque Transfer Characteristics of the Flexible Shafts for Movement Mechanism of a Crawler-type Rescue Robot,” Proc. of SICE Annual Conf. 2010, pp. 1303-1306, 2010.
- [12] R. Hayashi, I. Nakamura, Y. Yu, H. Amano, and T. Kinugasa, “Design of Torque Transfer Mechanism for the Crawler-type Searching Robot Driven by Flexible Shafts,” J. of the Robotics Society of Japan, Vol.29, No.9, pp. 829-836, 2011 (in Japanese).
- [13] M. Arai and S. Hirose, “Development of Cable Reel for Spherical Trailer Uniform Cable Winding,” J. of Robotics and Mechatronics, Vol.20, No.4, pp. 533-540, 2008.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.