Development Report:
Robotic Fish
Yogo Takada, Keisuke Koyama, and Takahiro Usami
Department of Mechanical and Physical Engineering, Osaka City University, 3-3-138 Sugimoto, Sumiyoshi-ku, Osaka 558-8585, Japan

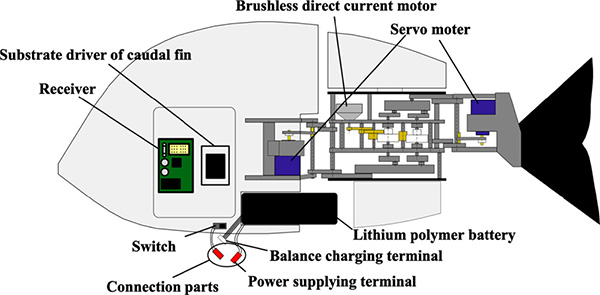 Structure of BREAM
Structure of BREAM- [1] Y. Takada, T. Nakamura, K. Koyama, and T. Tajiri, “Target Following Control of Small Fish Robot FOCUS Based on Color Information,” JSME, Series C, Vol.78, No.792, pp. 2924-2934, 2012.
- [2] Y. Takada, T. Nakamura, K. Koyama, and T. Wakisaka, “Selfposition Estimation of Small Fish Robot Based on Visual Information from Camera,” J. of Japan Institution of Marine Engineering, Vol.47, No.3, pp. 437-443, 2012.
- [3] Y. Takada, Y. Nakanishi, R Araki, and T. Wakisaka, “Investigation of Propulsive Force and Water Flow around a Small Fish Robot by PIV Measurement and Three-dimensional Numerical Analysis,” JSME, Series C, Vol.76, No.763, pp. 665-672, 2010.
- [4] Y. Takada, T. Ochiai, N. Fukuzaki, T. Tajiri, and T. Wakisaka, “Analysis of Flow around Robotic Fish by Three-dimensional Fluid-structure Interaction Simulation and Evaluation of Propulsive Performance,” J. of Aero Aqua Bio-mechanisms, Vol.3, No.1, pp. 57-64, 2013.
- [5] Y. Takada, R. Araki, T. Ochiai, T. Tajiri, and T. Wakisaka, “Effects of Tail Fin Flexibility on Propulsive Performance in Small Fish Robots (Investigation by Fluid-Structure Interaction Analysis Considering Elastic Deformation of Tail Fin),” JSME, Series C, Vol.77, No.778, pp. 2351-2362, 2011.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.