Development Report:
Views over last 60 days: 1,297
Development of Power-Assist Machine Using Linkage Mechanism
Hiroyuki Inoue
Department of Mechanical Engineering, Tsuyama National College of Technology, 624-1 Numa, Tsuyama-shi, Okayama 708-8509, Japan
Received:November 29, 2013Accepted:March 10, 2014Published:June 20, 2014
Keywords:power-assist machine, linkage mechanism, agricultural machinery, legged locomotion, muscle activity
Abstract
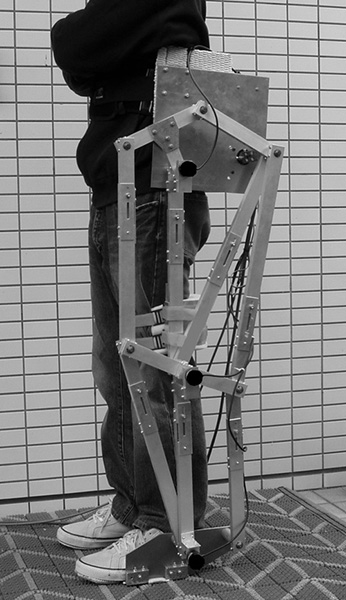
Walking assist machine
Cite this article as:H. Inoue, “Development of Power-Assist Machine Using Linkage Mechanism,” J. Robot. Mechatron., Vol.26 No.3, pp. 389-390, 2014.Data files:
References- [1] H. Inoue and T. Noritsugu, “Development of Walking Assist Machine Using Linkage Mechanism – Mechanism and Its Fundamental Motion –,” J. of Robotics and Mechatronics, Vol.22, No.2, pp. 189-196, 2010.
