Paper:
Characteristics and Individual Differences of Human Actions for Avoiding Harm to Eyes from a Robot
Takamasa Hattori*, Yoji Yamada*, Shogo Okamoto*,
Shuji Mori**, and Shunsuke Yamada***
*Graduate School of Engineering, Nagoya University, Furo-cho, Chikusa-ku, Nagoya 464-8603, Japan
**Faculty of Information Science and Electrical Engineering, Kyushu University, 744 Motooka, Nishi-ku, Fukuoka 819-0395, Japan
***Mitsui Chemicals, Inc., Japan

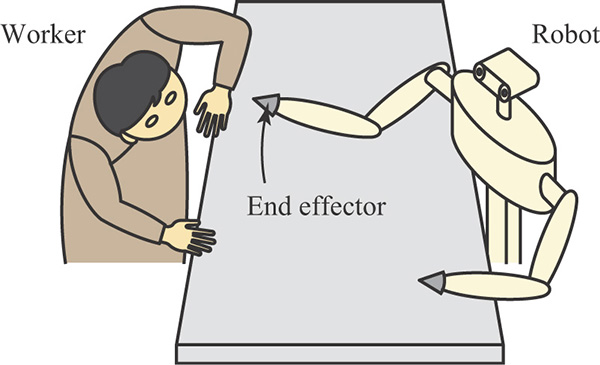
The assumed situation
- [1] New Energy and Industrial Technology Development Organization, “Project for Strategic Development of Advanced Robotics Elemental Technologies, Human-Robot Cooperative Cell Production and Assembly Systems (Field of Next-Generation Industrial Robots), Safe Upper-Body Humanoid Equipped with Compact Handling Systems,” Accomplishment report in fiscal 2006-2008, May 2009 (in Japanese).
- [2] “Safety of Machinery – General Principles for Design – Risk Assessment and Risk Reduction,” ISO 12100:2010, 2010.
- [3] Y. Yamada, “Evaluation of Human Pain Tolerance and Its Application to Designing Safety Robot Mechanisms for Human-Robot Coexistence,” J. of Robotics and Mechatronics, Vol.9, No.1, pp. 65-70, 1997.
- [4] S. Oberer and R. D. Schraft, “Robot-Dummy Crash Tests for Robot Safety Assessment,” In Proc. of the 2007 IEEE Int. Conf. on Robotics and Automation, pp. 2934-2939, Roma, Italy, Apr. 2007.
- [5] S. Haddadin, A. Albu-Schäffer, M. Frommberger, J. Rossmann, and G. Hirzinger, “The “DLR Crash Report”: Towards a Standard Crash-Testing Protocol for Robot Safety – Part I: Results,” In Proc. of the 2009 IEEE Int. Conf. on Robotics and Automation, pp. 272-279, Kobe, Japan, May 2009.
- [6] S. Ito, Y. Yamada, T. Hattori, S. Okamoto, and S. Hara, “Basic Experiments on Collision of Sharp Mechanical Hazards against Eye for Estimation of Injury Severity,” In Proc. of the 2012 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1912-1917, Guangzhou, China, Dec. 2012.
- [7] Japan Industrial Robot Association, “Study on Standardization of Industrial Robots in Fiscal 1987,” Mar. 1988 (in Japanese).
- [8] R. Ikeura, H. Otsuka, and H. Inooka, “Study on Emotional Evaluation of Robot Motions Based on Galvanic Skin Reflex,” The Japanese J. of Ergonomics, Vol.31, No.5, pp. 355-358, Oct. 1995 (in Japanese).
- [9] Y. Yamada, Y. Umetani, and Y. Hirasawa, “Proposal of a Psychophysiological Experiment System Applying the Reaction of Human Pupillary Dilation to Frightening Robot Motions,” In Proc. of the 1999 IEEE Int. Conf. on Systems, Man, and Cybernetics, Vol.2, pp. 1052-1057, Tokyo, Japan, Oct. 1999.
- [10] T. Hattori, Y. Yamada, S. Mori, S. Esaki, and S. Hara, “A Study on Harm-Avoidance Behavioral Characteristics Based on Psychological Experiments for Human-Robot Coexistence Systems,” IEICE Technical Report, Vol.110, No.98, pp. 7-10, Jun. 2010 (in Japanese).
- [11] T. Hattori, Y. Yamada, S. Mori, S. Okamoto, and S. Hara, “Psychological Experiments on Avoidance Action Characteristics for Estimating Avoidability of Harm to Eyes from Robots,” In Proc. of the 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 5400-5405, Vilamoura, Portugal, Oct. 2012.
- [12] T. Hattori, Y. Yamada, S. Okamoto, S. Mori, S. Yamada, and S. Hara, “Study on Avoidance Action Parameters against a Sharp End-Effector Tip Approaching Human’s Eyes,” In Proc. of the 21st IEEE Int. Symposium on Robot and Human Interactive Communication, pp. 25-30, Paris, France, Sep. 2012.
- [13] T. Ogure, Y. Nakabo, S. Jeong, and Y. Yamada, “Hazard Analysis of an Industrial Upper-Body Humanoid,” Industrial Robot: An Int. J., Vol.36, No.5, pp. 469-476, Aug. 2009.
- [14] R. D. Luce, “Response Times: Their Role in Inferring Elementary Mental Organization,” Oxford University Press, New York, NY, 1986.
- [15] R. G. D. Steel, “A Rank Sum Test for Comparing All Pairs of Treatments,” Technometrics, Vol.2, No.2, pp. 197-207, May 1960.
- [16] M. Dwass, “Some k-Sample Rank-Order Tests,” In I. Olkin, S. G. Ghurye, W. Hoeffding, W. G. Madow, and H. B. Mann (Eds.), Contributions to Probability and Statistics: Essays in Honor of Harold Hotelling, chapter 17, pp. 198-202, Stanford University Press, Stanford, CA, 1960.
- [17] H. B. Mann and D. R. Whitney, “On a Test of Whether One of Two Random Variables Is Stochastically Larger Than the Other,” The Annals of Mathematical Statistics, Vol.18, No.1, pp. 50-60, Mar. 1947.
- [18] C. Spearman, “The Proof and Measurement of Association between Two Things,” The American J. of Psychology, Vol.15, No.1, pp. 72-101, Jan. 1904.
- [19] C. Spearman, “‘Footrule’ for Measuring Correlation,” British J. of Psychology, Vol.2, No.1, pp. 89-108, Jul. 1906.
- [20] K. Sunada, Y. Yamada, T. Hattori, S. Okamoto, and S. Hara, “Extrapolation Simulation for Estimating Human Avoidability in Human-Robot Coexistence Systems,” In Proc. of the 21st IEEE Int. Symposium on Robot and Human Interactive Communication, pp. 785-790, Paris, France, Sep. 2012.
- [21] W. Schiff, J. A. Caviness, and J. J. Gibson, “Persistent Fear Responses in Rhesus Monkeys to the Optical Stimulus of “Looming”,” Science, Vol.136, No.3520, pp. 982-983, Jun. 1962.
- [22] J. J. Gibson, “Visually Controlled Locomotion and Visual Orientation in Animals,” British J. of Psychology, Vol.49, No.3, pp. 182-194, Aug. 1958.
- [23] E. Parzen, “On Estimation of a Probability Density Function and Mode,” The Annals of Mathematical Statistics, Vol.33, No.3, pp. 1065-1076, Sep. 1962.
- [24] B. W. Silverman, “Density Estimation for Statistics and Data Analysis,” Chapman and Hall, London, UK, 1986.
- [25] H. Oja and R. H. Randles, “Multivariate Nonparametric Tests,” Statistical Science, Vol.19, No.4, pp. 598-605, Nov. 2004.
- [26] T. Royen, “Tables for Studentized Multivariate Maximum Ranges and Their Application by Maximum Range Tests,” Biometrical J., Vol.32, No.6, pp. 643-680, 1990.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.