Paper:
Evaluation of Driving Method of the Flexible Body Moving in Narrow Flow Passage
Akio Yamano*, Atsuhiko Shintani**, Tomohiro Ito**,
and Chihiro Nakagawa**
*Graduate School of Engineering, Osaka Prefecture University
**Department of Mechanical Engineering, Osaka Prefecture University, 1-1 Gakuen-cho, Naka-ku, Sakai, Osaka 599-8531, Japan

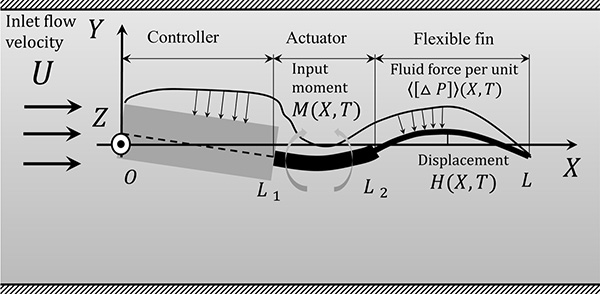 Analytical model
Analytical model- [1] R. Mason, “Fluid Locomotion and Trajectory Planning for Shape-Changing Robots,” Doctoral paper of California Institute of Technology, p. 2, 2003.
- [2] A. Crespi, D. Lachat, A. Pasquier, and A. Ijspeert, “Controlling Swimming and Crawling in a Fish Robot,” an Extended Version of an Article Presented at BioRob2006 the First IEEE/RAS-EMBS Int. Conf. on Biomedical Robotics and Biomechatronics 2008, pp. 1-10, 2008.
- [3] C. Wang et al., “CPG-Based Locomotion Control of a Robotic Fish: Using Linear Oscillators and Reducing Control Parameters via PSO,” Int. J. of Innovative Computing, Information and Control, Vol.7, No.7, pp. 4237-4249, 2011.
- [4] N. Kamamichi et al., “A Snake-Like Swimming Robot Using IPMC Actuator/Sensor,” the 2006 IEEE Int. Conf. on Robotics and Automation, pp. 1812-1817, 2006.
- [5] Z. Wang et al., “A Micro-Robot Fish with Embedded SMA Wire Actuated Flexible Biomimetic Fin,” Sensors and Actuators A, Vol.144, pp. 354-360, 2008.
- [6] W. Chu et al., “Review of Biomimetic Underwater Robots Using Smart Actuators,” Int. J. of Precision Engineering and Manufacturing, Vol.13, No.7, pp. 1281-1292, 2012.
- [7] A. Yamano et al., “Basic Study on Moving Body in Narrow Passage Based on Axial-Flow-Induced Vibration,” JSME Dynamics and Design Conf. 2012, No.12 (USB Proc.), 2012.
- [8] T. Hoshino et al., “Vibration Analysis of a Stepped Cantilever Beam Elastically Coupled With a Rigid Body,” JSME Dynamics and Design Conf. 2012, No.12 (USB Proc.), 2012.
- [9] A. Munnier et al., “Locomotion of Articulated Bodies in an Ideal Fluid: 2d Model with Buoyancy, Circulation and Collisions,” Mathematical Models and Methods in Applied Sciences, Vol.20, pp. 1899-1940, 2010.
- [10] O. Doare et al., “Flutter of an Elastic Plate in a Channel Flow: Confinement and Finite-size Effects,” J. of Fluids and Structures, Vol.27, pp. 76-88, 2011.
- [11] Y. Tadesse et al., “Tailoring the Response Time of Shape Memory Alloy Wires though Active Cooling and Pre-stress,” J. of Intelligent Material Systems and Structures, Vol.21, p. 4, 2009.
- [12] D. Homma, “Development and Application of Function Anisotropic Shape Memory Alloy,” J. of JSPE, Vol.75, No.6, 2009.
- [13] R. Gorbet, “Control of hysteretic Systems with Preisach Representations,” Doctoral paper of Waterloo University, pp. 1-186, 1997.
- [14] R. Gorbet et al., “Preisach Model Identification of a Two-Wire SMA Actuator,” the 1998 lEEE Int. Conf. on Robotics & Automation, pp. 2161-2167, 1998.
- [15] T. Lew et al., “Identification of response surface models using genetic programing,” Mechanical Systems and Signal Processing, Vol.20, pp. 1819-1831, 2006.
- [16] T. Miao et al., “An Accurately Controlled Antagonistic ShapeMemory Alloy Actuator with Self-Sensing,” Sensors, Vol.12, pp. 7682-7700, 2012.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.