Paper:
Parameter Study of a Step-Climbing Machine for Heavy Load Carriers
Shinji Kajiwara
Faculty of Science and Engineering, Kindai University, 3-4-1 Kowakae, Higashiosaka, Osaka 577-8502, Japan

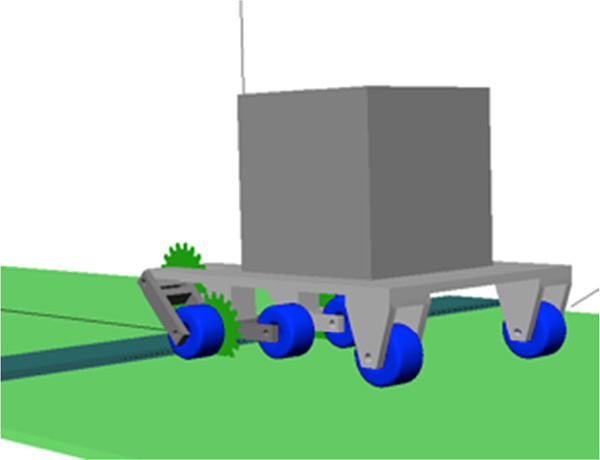
CAE model of heavy load carrier
- [1] K. Taguchi and H. Satoh, “A Study of the Wheel-Feet Mechanism for Stair Climbing,” J. of the Robotics Society of Japan, Vol.15, No.1, pp. 118-123, 1997.
- [2] T. Iwamoto and K. Shibuya, “Concept and Mechanism of Robot Vehicle Using Variable Configuration Segmented Wheels,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.71, No.701, pp. 171-177, 2005.
- [3] D. Chugo, K. Kawabata, H. Kaetsu, H. Asama, and T. Mishima, “Configuration-Based Wheel Control for Step-Climbing Vehicle,” J. of Robotics and Mechatronics, Vol.19, No.1, pp. 52-59, 2007.
- [4] M. M. Dalvand and M. M. Moghadam, “MSRox: Stair climber smart mobile robot (MSRox),” Autonomous Robots, Vol.20, pp. 3-14, 2004.
- [5] A. S. Boxerbaum, P. Werk, R. D. Quinn, and R. Vaidyanathan, “Design of an autonomous amphibious robot for surf zone operation: part i mechanical design for multi-mode mobility,” Proc. 2005 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 1459-1464, 2005.
- [6] G. Clement and E. Villedieu, “Mobile Robot for Hostile Environments,” Proc. of the Int. Topical Meeting on Remote Systems and Robotics in Hostile Environments, pp. 270-277, 1987.
- [7] S. Hirose, T. Sensu, and S. Aoki, “the TAQT Carrier: A Practical Terrain-Adaptive Quadru-Track Carrier Robot,” Proc of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2068-2073, 1992.
- [8] R. K. Brown, “Stair-climbing wheel chair,” U.S. Patent 3283839, 1966.
- [9] Y. Hosono and S. Yoshida, “Experiments and Development of a Mechanism Assisting a Hand-Propelled Wheelchair in Driving over a Higher Step,” J. of Japan Industrial Management, Vol.41, No.6, pp. 390-397, 1991.
- [10] H. Ikeda, Y. Katsumata, M. Shoji, T. Takahashi, and E. Nakano, “The Method of Step Climbing Using a Wheeled Robot and a Wheelchair,” J. of the Robotics Society of Japan, Vol.26, No.2, pp. 200-209, 2008.
- [11] Y. Takahashi, S. Ogawa, and S. Machida, “Step climbing using power assist wheel chair robot with inverse pendulum control,” Proc. of ICRA’00 IEEE Int. Conf., Robotics and Automation, Vol.2, pp. 1360-1365, 2000.
- [12] M. Morales, A. Gonzalez, V. Feliu, and P. Pintad, “Environment adaptation of a new staircase-climbing wheelchair,” Auton Robot, Vol.23, pp. 275-292, 2007.
- [13] M. Wada, “A 4WD Omnidirectional Wheelchair with Enhanced Step Climbing Capability,” J. of Robotics and Mechatronics, Vol.20, No.6, pp. 846-853, 2008.
- [14] R. Morales, J. A. Somolinos, and J. A. Cerrada, “Dynamic model of a stair-climbing mobility system and its experimental validation,” Multibody System Dynamics, Vol.28, No.4, pp. 349-357, 2012.
- [15] V. Krovi and V. Kumar, “Modeling and control of a hybrid locomotion system,” Multibody System Dynamics, Vol.28, No.4, pp. 349-357, 2012.
- [16] H. Nakajima and E. Nakano, “Adaptive Gait for Large Rough Terrain of a Leg-wheel Robot: 1st Report, Gait Strategy,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.72, No.721, pp. 2926-2931, 2006.
- [17] S. Nakajima and E. Nakano, “Adaptive Gait for Large Rough Terrain of a Leg-Wheel Robot,” J. of Robotics and Mechatronics, Vol.21, No.1, pp. 12-19, 2009.
- [18] E. Z. Moore, D. Campbell, F. Grimminger, and M. Buehler, “Reliable stair climbing in the simple hexapod ‘RHex’,” Proc. of the ICRA’02, IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2222-2227, 2002.
- [19] K. Tadakuma, R. Tadakuma, and S. Hirose, “Mechanical Design of VmaxCarrier2: Omnidirectional Mobile Robot with Function of Step-Climbing,” J. of Robotics and Mechatronics, Vol.17, No.2, pp. 198-207, 2005.
- [20] D. Chugo, K. Kawabata, H. Kaetsu, H. Asama, and T. Mishima, “Development of a control system for an omni-directional vehicle with step-climbing ability,” Advanced Robotics, Vol.19, No.1, pp. 55-71, 2005.
- [21] C. Chen, C. Feng, and Y. Hsieh, “Design and realization of a mobile wheelchair robot for all terrains,” Advanced Robotics, Vol.17, No.8, pp. 739-760, 2003.
- [22] K. Taguchi, “Enhanced wheel system for step climbing,” Advanced Robotics, Vol.9, No.2, pp. 137-147, 1995.
- [23] T. Kinoshita, Y. Mizukuchi, and M. Nakamura, “Study on the Impact Occurring by a Curb Step of Various Kinds of Shape in Wheelchair,” J. of the Japan Society for Welfare Engineering, Vol.13, No.1, pp. 16-21, 2011.
- [24] K. Aoki, Y. Mizukuchi, M. Nakamura, and K. Aoki, “Study on the Impact Occurring by the Step in Wheelchair,” Trans. of the Japan Society of Mechanical Engineers, Series A, Vol.75, No.759, pp. 1542-1548, 2009.
- [25] M. Higuchi, T. Shinagawa, H. Ito, Y. Takeda, and K. Sugimoto, “Improvement of Ride Quality of a Wheelchair When it Passes over Small Steps,” J. of Robotics and Mechatronics, Vol.19, No.2, pp. 181-189, 2007.
- [26] J. Choi, C. S. Park, T. Kitagawa, K. Nakatani, and S. Sugii, “Development of a Step-Climbing Mechanism and Its Application to a Mobility Aid for the Elderly,” Technology Research Institute of Osaka Prefecture, Vol.22, pp. 53-57, 2008.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.