Research Paper:
Adaptive Identification Method for Vehicle Driving Model Capable of Driving with Large Acceleration Changes and Steering
Soichiro Matsumoto and Mitsuyuki Saito†
Department of Systems Engineering, Graduate School of Information Sciences, Hiroshima City University
3-4-1 Ozuka-higashi, Asaminami-ku, Hiroshima, Hiroshima 731-3194, Japan
†Corresponding author

In the future, considering the expansion of the autonomous driving society, autonomous driving systems that can drive safely and quickly will be required for the purpose of saving lives and transporting goods even on rough road such as snowy, icy, and unpaved roads. In such unknown environments, technologies that combine model-based control and artificial intelligence (AI) are attracting attention for the purpose of ensuring operational stability and reliability. The second author has proposed a vehicle driving model that is robust to road geometry and ever-changing environmental disturbances. This model is based on a two-wheel model, and expresses the error in the position of the center of gravity of the vehicle by the front wheel steering angle deviation, and adaptively estimates this deviation. However, this model has large modeling errors when driving at high velocity on slippery roads. In this study, we extend this model proposed in previous study, and propose a new vehicle driving model that can handle situations such as driving with large acceleration changes and steering on bad roads such as snowy and wet roads. Then, we demonstrate the usefulness of the proposed method in a simulation using vehicle motion analysis software.
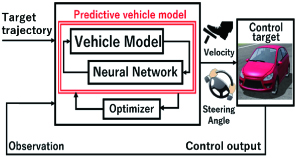
Simplified control architecture using MPC
- [1] M. Bojarski et al., “End to end learning for self-driving cars,” arXiv: 1604.07316, 2016. https://doi.org/10.48550/arXiv.1604.07316
- [2] F. Codevilla et al., “End-to-end driving via conditional imitation learning,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4693-4700, 2018. https://doi.org/10.1109/ICRA.2018.8460487
- [3] W. Schwarting, J. Alonso-Mora, and D. Rus, “Planning and decision-making for autonomous vehicles,” Annual Review of Control, Robotics, and Autonomous Systems, Vol.1, pp. 187-210, 2018. https://doi.org/10.1146/annurev-control-060117-105157
- [4] B. Paden et al., “A survey of motion planning and control techniques for self-driving urban vehicles,” IEEE Trans. on Intelligent Vehicles, Vol.1, No.1, pp. 33-55, 2016. https://doi.org/10.1109/TIV.2016.2578706
- [5] J. Shi et al., “Design and evaluation image recognition sub-tasks to improve end-to-end learning model for self driving cars,” The 33rd Annual Conf. of the Japanese Society for Artificial Intelligence, Article No.1L2-J-11-01, 2019.
- [6] S. Adachi, “Physics, information and control,” Calsonic Kansei Technical Review, Vol.11, pp. 6-14, 2014 (in Japanese).
- [7] J. Kong et al., “Kinematic and dynamic vehicle models for autonomous driving control design,” 2015 IEEE Intelligent Vehicles Symp. (IV), pp. 1094-1099, 2015. https://doi.org/10.1109/IVS.2015.7225830
- [8] R. Bosch, “Automotive Handbook,” 8th Edition, John Wiley & Sons, 2011.
- [9] Y. Yamauchi, M. Saito, and T. Ono, “Adaptive identification method of vehicle modeling according to the fluctuation of road and running situation in autonomous driving,” 2019 58th Annual Conf. of the Society of Instrument and Control Engineers of Japan (SICE), pp. 1255-1260, 2019. https://doi.org/10.23919/SICE.2019.8859845
- [10] Z. Li et al., “Trajectory-tracking control of mobile robot systems incorporating neural-dynamic optimized model predictive approach,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, Vol.46, No.6, pp. 740-749, 2016. https://doi.org/10.1109/TSMC.2015.2465352
- [11] J. Ji et al., “Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints,” IEEE Trans. on Vehicular Technology, Vol.66, No.2, pp. 952-964, 2017. https://doi.org/10.1109/TVT.2016.2555853
- [12] M. Nagai, “Present and future of ADAS and automated driving systems,” J. of the Society of Instrument and Control Engineers, Vol.54, No.11, pp. 803-807, 2015 (in Japanese). https://doi.org/10.11499/sicejl.54.803
- [13] A. Koga et al., “Personalized autonomous driving using model predictive control,” Trans. of Society of Automotive Engineers of Japan, Vol.47, No.6, pp. 1431-1437, 2016 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.