Paper:
IPMSM Speed and Current Controller Design for Electric Vehicles Based on Explicit MPC
Fang Liu*, Feng Gao*, Ling Liu**, and Denis N. Sidorov***
*School of Automation, Central South University
Room 114, Minzhu Building, Yuelu Mountain, Changsha, Hunan 410083, China
**Power Construction Corporation of China, Jiangxi Electric Power Design Institute Co., Ltd.
Room 426, Jingdong Road, Gao Xin District, Nanchang, Jiangxi 330096, China
***Operations Research Lab, Melentiev Energy Systems Institute, Siberian Branch of the Russian Academy of Sciences (RAS)
130 Lermontov Street, Energy Systems Institute of Russian Academy of Sciences, Irkutsk 664033, Russia

The difficulties in implementing the model predictive control (MPC) in interior permanent-magnet synchronous motors (IPMSMs) consist of the nonlinear behavior of IPMSMs and the computational effort required by MPC. This paper presents an IPMSM controller design method for electric vehicles based on explicit MPC (EMPC), which uses a different linearization method. The proposed controller combines the speed and current controllers and replaces the traditional cascade structure. First, the nonlinear terms in the system model are added into the control input as voltage compensation to obtain a simple linear model. Next, the proposed controller based on MPC is designed, which considers the effects of load torque and uses an increment model. Furthermore, the controller applies both current and voltage constraints. The EMPC method based on a binary search is used to accelerate the solution of the optimization problem. Finally, the simulation results show the validity and superiority of the proposed method.
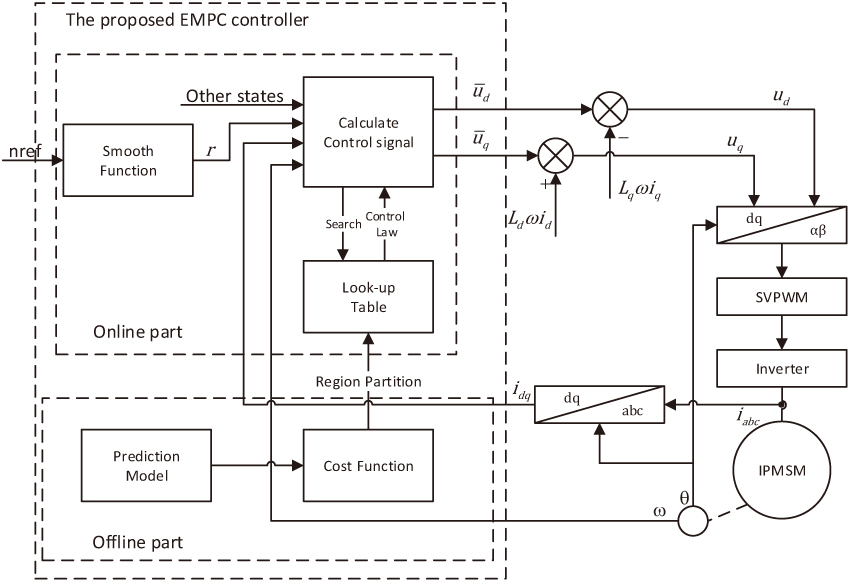
Block diagram of IPMSM control system based on EMPC
- [1] S. Liu, X. Guo, and L. Zhang, “Robust Adaptive Backstepping Sliding Mode Control for Six-Phase Permanent Magnet Synchronous Motor Using Recurrent Wavelet Fuzzy Neural Network,” IEEE Access, Vol.5, pp. 14502-14515, 2017.
- [2] H. Chaoui, M. Khayamy, and O. Okoye, “Adaptive RBF Network Based Direct Voltage Control for Interior PMSM Based Vehicles,” IEEE Trans. on Vehicular Technology, Vol.67, No.7, pp. 5740-5749, 2018.
- [3] F. Mendoza-Mondragón, V. M. Hernández-Guzmán, and J. Rodríguez-Reséndiz, “Robust Speed Control of Permanent Magnet Synchronous Motors Using Two-Degrees-of-Freedom Control,” IEEE Trans. on Industrial Electronics, Vol.65, No.8, pp. 6099-6108, 2018.
- [4] B. Xu, X. Shen, W. Ji et al., “Adaptive Nonsingular Terminal Sliding Model Control for Permanent Magnet Synchronous Motor Based on Disturbance Observer,” IEEE Access, Vol.6, pp. 48913-48920, 2018.
- [5] H. Chaoui, M. Khayamy, and A. A. Aljarboua, “Adaptive Interval Type-2 Fuzzy Logic Control for PMSM Drives With a Modified Reference Frame,” IEEE Trans. on Industrial Electronics, Vol.64, No.5, pp. 3786-3797, 2017.
- [6] C. Xia, Y. Wang, and T. Shi, “Implementation of Finite-State Model Predictive Control for Commutation Torque Ripple Minimization of Permanent-Magnet Brushless DC Motor,” IEEE Trans. on Industrial Electronics, Vol.60, No.3, pp. 896-905, 2013.
- [7] S. Bolognani, S. Bolognani, L. Peretti, and M. Zigliotto, “Design and Implementation of Model Predictive Control for Electrical Motor Drives,” IEEE Trans. on Industrial Electronics, Vol.56, No.6, pp. 1925-1936, 2009.
- [8] Z. Mynar, L. Vesely, and P. Vaclavek, “PMSM Model Predictive Control With Field-Weakening Implementation,” IEEE Trans. on Industrial Electronics, Vol.63, No.8, pp. 5156-5166, 2016.
- [9] T. Türker, U. Buyukkeles, and A. F. Bakan, “A Robust Predictive Current Controller for PMSM Drives,” IEEE Trans. on Industrial Electronics, Vol.63, No.6, pp. 3906-3914, 2016.
- [10] J. Guzinski and H. Abu-Rub, “Speed Sensorless Induction Motor Drive With Predictive Current Controller,” IEEE Trans. on Industrial Electronics, Vol.60, No.2, pp. 699-709, 2013.
- [11] Y. Luo and C. Liu, “Pre- and Post-Fault Tolerant Operation of a Six-Phase PMSM Motor Using FCS-MPC Without Controller Reconfiguration,” IEEE Trans. on Vehicular Technology, Vol.68, No.1, pp. 254-263, 2019.
- [12] Y. Zhang, D. Xu, and L. Huang, “Generalized Multiple-Vector-Based Model Predictive Control for PMSM Drives,” IEEE Trans. on Industrial Electronics, Vol.65, No.12, pp. 9356-9366, 2018.
- [13] H. T. Nguyen and J.-W. Jung, “Finite Control Set Model Predictive Control to Guarantee Stability and Robustness for Surface-Mounted PM Synchronous Motors,” IEEE Trans. on Industrial Electronics, Vol.65, No.11, pp. 8510-8519, 2018.
- [14] A. Bemporad, M. Morari, V. Dua et al., “The explicit linear quadratic regulator for constrained systems,” Automatica, Vol.38, No.1, pp. 3-20, 2002.
- [15] M. Herceg, M. Kvasnica, C. N. Jones, and M. Morari, “Multi-Parametric Toolbox 3.0,” Proc. of the European Control Conf., pp. 502-510, 2013.
- [16] P. Tøndel, T. A. Johansen, and A. Bemporad, “Evaluation of piecewise affine control via binary search tree,” Automatica, Vol.39, No.5, pp. 945-950, 2003.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.