Paper:
Evolutionary Acquisition of Autonomous Specialization in a Path-Formation Task of a Robotic Swarm
Motoaki Hiraga*, Toshiyuki Yasuda**, and Kazuhiro Ohkura*
*Graduate School of Engineering, Hiroshima University
1-4-1 Kagamiyama, Higashi-Hiroshima, Hiroshima 739-8527, Japan
**Graduate School of Science and Engineering, University of Toyama
3190 Gofuku, Toyama 930-8555, Japan

Task allocation is an important concept not only in biological systems but also in artificial systems. This paper reports a case study of autonomous task allocation behavior in an evolutionary robotic swarm. We address a path-formation task that is a fundamental task in the field of swarm robotics. This task aims to generate the collective path that connects two different locations by using many simple robots. Each robot has a limited sensing ability with distance sensors, a ground sensor, and a coarse-grained omnidirectional camera to perceive its local environment and the limited actuators composed of two colored LEDs and two-wheeled motors. Our objective is to develop a robotic swarm with autonomous specialization behavior from scratch, by exclusively implementing a homogeneous evolving artificial neural network controller for the robots to discuss the importance of embodiment that is the source of congestion. Computer simulations demonstrate the adaptive collective behavior that emerged in a robotic swarm with various swarm sizes and confirm the feasibility of autonomous task allocation for managing congestion in larger swarm sizes.
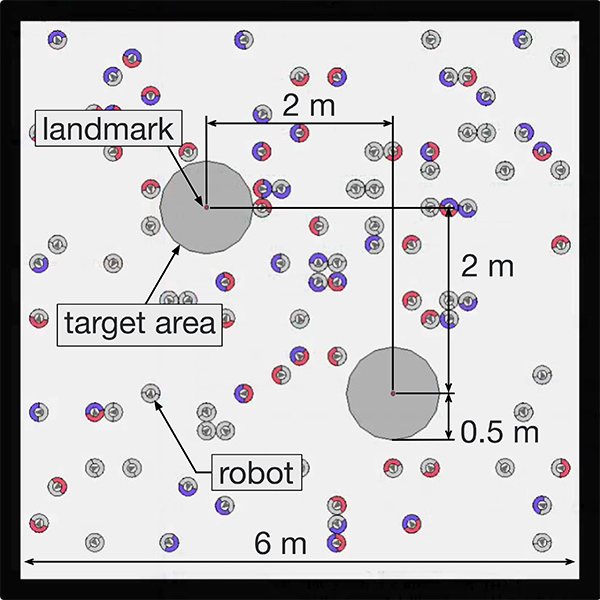
Settings of the path-formation task
- [1] E. Şahin, “Swarm robotics: from sources of inspiration to domains of application,” Swarm Robotics, Lecture Notes in Computer Science, Vol.3342, pp. 10-20, Springer, 2005.
- [2] M. Brambilla, E. Ferrante, M. Birattari, and M. Dorigo, “Swarm robotics: a review from the swarm engineering perspective,” Swarm Intelligence, Vo.7, No.1, pp. 1-41, 2013.
- [3] L. Bayındır, “A review of swarm robotics tasks,” Neurocomputing, Vol.172, pp. 292-321, 2016.
- [4] M. J. B. Krieger and J.-B. Billeter, “The call of duty: self-organised task allocation in a population of up to twelve mobile robots,” Robotics and Autonomous Systems, Vol.30, No.1-2, pp. 65-84, 2000.
- [5] W. Liu, A. F. Winfield, J. Sa, J. Chen, and L. Dou, “Towards energy optimization: emergent task allocation in a swarm of foraging robots,” Adaptive Behavior, Vol.15, No.3, pp. 289-305, 2007.
- [6] T. H. Labella, M. Dorigo, and J.-L. Deneubourg, “Division of labor in a group of robots inspired by ants’ foraging behavior,” ACM Trans. on Autonomous and Adaptive Systems, Vol.1, No.1, pp. 4-25, 2006.
- [7] A. Brutschy, G. Pini, C. Pinciroli, M. Birattari, and M. Dorigo, “Self-organized task allocation to sequentially interdependent tasks in swarm robotics,” Autonomous agents and multi-agent systems, Vol.28, No.1, pp. 101-125, 2014.
- [8] V. Sperati, V. Trianni, and S. Nolfi, “Self-organised path formation in a swarm of robots,” Swarm Intelligence, Vol.5, No.2, pp. 97-119, 2011.
- [9] S. Nolfi and D. Floreano, “Evolutionary robotics: the biology, intelligence, and technology of self-organizing machines,” MIT press, 2000.
- [10] V. Trianni, “Evolutionary swarm robotics: evolving self-organising behaviours in groups of autonomous robots,” Studies in Computational Intelligence, Vol.108, Springer, 2008.
- [11] G. Francesca and M. Birattari, “Automatic design of robot swarms: achievements and challenges,” Frontiers in Robotics and AI, Vol.3, No.29, 2016.
- [12] X. Yao, “Evolving artificial neural networks,” Proc. of the IEEE, Vol.87, No.9, pp. 1423-1447, 1999.
- [13] V. Trianni, R. Groß, T. H. Labella, E. Şahin, and M. Dorigo, “Evolving aggregation behaviors in a swarm of robots,” European Conf. on Artificial Life, Lecture Notes in Artificial Intelligence, Vol.2801, pp. 865-874. Springer, 2003.
- [14] O. Soysal, E. Bahçeci, and E. Şahin, “Aggregation in swarm robotic systems: Evolution and probabilistic control,” Turkish J. of Electrical Engineering and Computer Sciences, Vol.15, No.2, pp. 199-225, 2007.
- [15] G. Baldassarre, S. Nolfi, and D. Parisi, “Evolving mobile robots able to display collective behaviors,” Artificial Life, Vol.9, No.3, pp. 255-267, 2003.
- [16] R. Groß and M. Dorigo, “Towards group transport by swarms of robots,” Int. J. of Bio-Inspired Computation, Vol.1, No.1-2, pp. 1-13, 2009.
- [17] E. Ferrante, A. E. Turgut, E. Duéñez-Guzmán, M. Dorigo, and T. Wenseleers, “Evolution of self-organized task specialization in robot swarms,” PLoS Computational Biology, Vol.11, No.8, 2015.
- [18] E. Catto, “Box2D: A 2D physics engine for games,” http://box2d.org [accessed March 3, 2017]
- [19] H.-P. Schwefel, “Evolution and optimum seeking,” John Wiley & Sons, 1995.
- [20] A. E. Eiben and J. E. Smith, “Introduction to evolutionary computing,” Springer, 2003.
- [21] T. Bektas, “The multiple traveling salesman problem: an overview of formulations and solution procedures,” Omega, Vol.34, No.3, pp. 209-219, 2006.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.