Research Paper:
Center of Gravity Detection of Crane Load Using Lifting Force Sensor and Depth Camera on Hook
Yuma Nishida, Hiroaki Seki†
 , Tokuo Tsuji
, and Tatsuhiro Hiramitsu
, Tokuo Tsuji
, and Tatsuhiro Hiramitsu
Institute of Science and Engineering, Kanazawa University
Kakuma-machi, Kanazawa, Ishikawa 920-1192, Japan
†Corresponding author

When lifting a load using a crane, it must be hoisted directly above its center of gravity (COG) to prevent tilting and swinging, which can lead to serious accidents. Therefore, accurately identifying the COG before lifting is essential for crane safety and is a key technology for crane-lift automation. Although many methods exist for measuring the COG after the load is lifted, they often fail to prevent potential risks. Therefore, for loads with a rectangular bottom, we propose and develop a sensor system capable of detecting COG “before” the load is lifted. A depth camera and a lifting force sensor are mounted on a crane hook. The lifting force sensor also functions as a spring, allowing the lifting force to increase gradually when a crane wire is wound. The direction of the tilting of the load, that is, the direction of the COG, is detected from the change in the depth image of the top surface of the load when the load is lifted only slightly. The horizontal distance to the COG is determined by observing the changes in the lifting force, which varies before and after any edge of the load bottom is slightly lifted. Unless the COG of the load is directly beneath the lifting position, the load typically tilts toward one of the four edges of the rectangular bottom. Subsequently, to determine the COG in a two-dimensional plane, two lifting trials are required when the weight of the load is known, whereas three trials are required if the weight is unknown. Experiments were conducted to detect the COG of loads, confirming the effectiveness and sufficient accuracy of the proposed detection method.
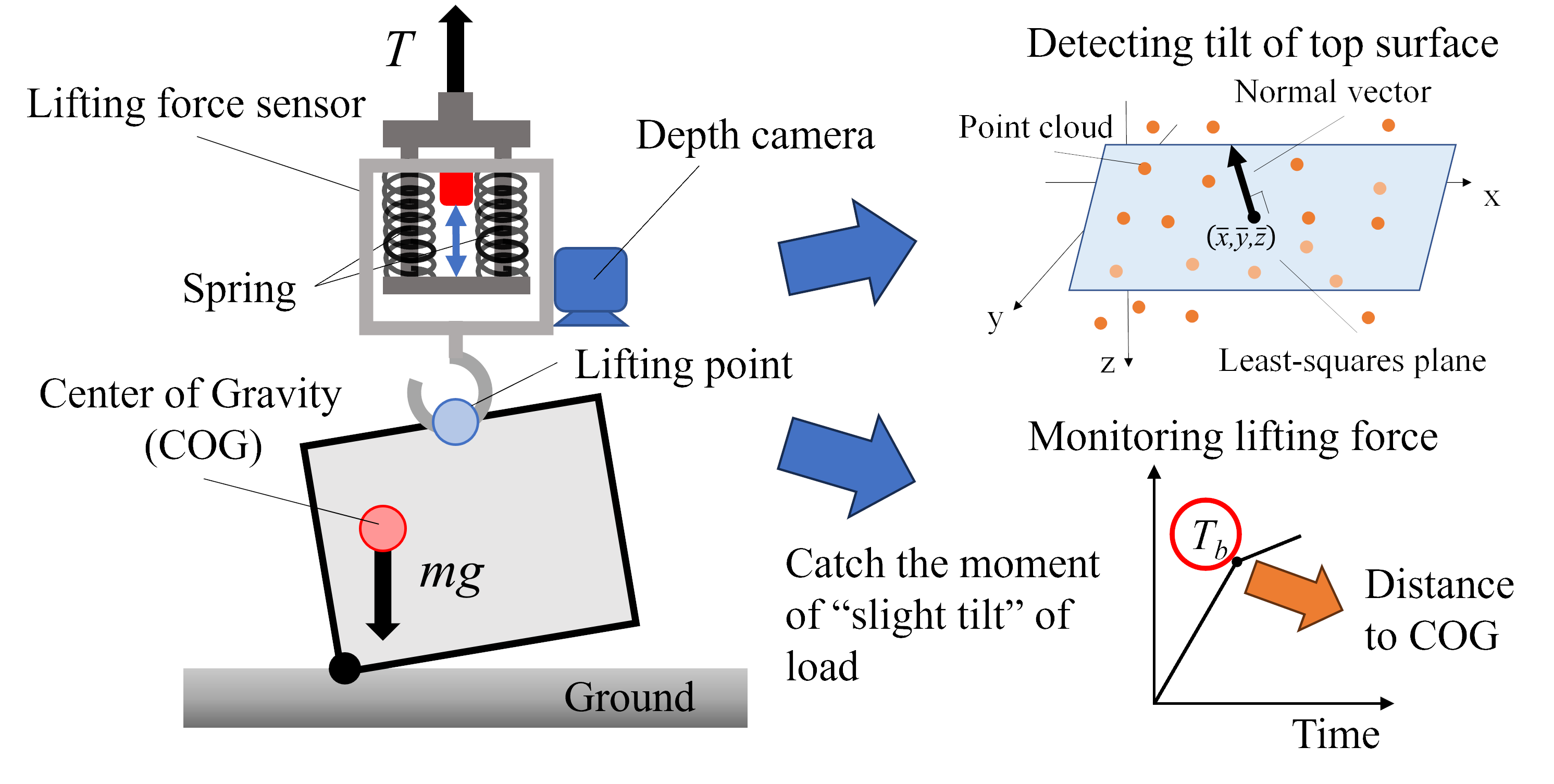
COG detection system using lifting force sensor and depth camera
- [1] W. He, Z. Lin, W. Li, C. J. Wong, D. Kong, and E. W. L. Loh, “The comprehensive safety assessment method for complex construction crane accidents based on scenario analysis – A case study of crane accidents,” Computers & Industrial Engineering, Vol.199, Article No.110716, 2025. https://doi.org/10.1016/j.cie.2024.110716
- [2] R. L. Neitzel, N. S. Seixas, and K. K. Ren, “A review of crane safety in the construction industry,” Applied Occupational and Environmental Hygiene, Vol.16, No.12, pp. 1106-1117, 2001. https://doi.org/10.1080/10473220127411
- [3] W. Jiang, L. Ding, and C. Zhou, “Digital twin: Stability analysis for tower crane hoisting safety with a scale model,” Automation in Construction, Vol.138, Article No.104257, 2022. https://doi.org/10.1016/j.autcon.2022.104257
- [4] Y. Wang, H. Suzuki, Y. Ohtake, T. Kosaka, and S. Noguchi, “Generating a visual map of the crane workspace using top-view cameras for assisting operation,” J. Robot. Mechatron., Vol.32, No.2, pp. 409-421, 2020. https://doi.org/10.20965/jrm.2020.p0409
- [5] Z. Zhou, B. Johns, Y. Fang, Y. Bai, and E. Abdi, “Physics-informed neural network for load sway prediction in travelling autonomous mobile cranes,” Advanced Engineering Informatics, Vol.65, Article No.103269, 2025. https://doi.org/10.1016/j.aei.2025.103269
- [6] L. C. Price, J. Chen, J. Park, and Y. K. Cho, “Multisensor-driven real-time crane monitoring system for blind lift operations: Lessons learned from a case study,” Automation in Construction, Vol.124, Article No.103552, 2021. https://doi.org/10.1016/j.autcon.2021.103552
- [7] A. Zhu, Z. Ahang, and W. Pan, “Technologies, levels and directions of crane-lift automation in construction,” Automation in Construction, Vol.153, Article No.104960, 2023. https://doi.org/10.1016/j.autcon.2023.104960
- [8] T. Tanizaki, K. Yamada, S. Nakagawa, and H. Katagiri, “Scheduling algorithm using path relinking for production process with crane interference,” Int. J. Automation Technol., Vol.17, No.1, pp. 71-80, 2023. https://doi.org/10.20965/ijat.2023.p0071
- [9] J. Sasaki, G. Nishida, A. Yamashita, Y. Aiyama, J. Ota, and T. Arai, “Estimating the center of gravity of an object using tilting by multiple mobile robots,” Proc. 1997 IEEE/RSJ Int. Conf. on Intelligent Robot and Systems, Vol.3, pp. 1748-1753, 1997. https://doi.org/10.1109/IROS.1997.656597
- [10] Y. Watanabe, “Center of gravity detection system,” Patent, WO 2013/061989 A1, 2013.
- [11] X. T. Pham, M. Okuma, M. Bur, and Z. Abidin, “Vehicle’s center of gravity estimation using pavement Weight-in-Motion,” Mechanical Engineering J., Vol.9, No.1, Article No.21-00322, 2022. https://doi.org/10.1299/mej.21-00322
- [12] X. Huang and J. Wang, “Center of gravity height real-time estimation for lightweight vehicles using tire instant effective radius,” Control Engineering Practice, Vol.21, No.4, pp. 370-380, 2013. https://doi.org/10.1016/j.conengprac.2012.12.003
- [13] C. Lin, X. Gong, R. Xiong, and X. Cheng, “A novel H _infty ∞ and EKF joint estimation method for determining the center of gravity position of electric vehicles,” Applied Energy, Vol.194, pp. 609-616, 2017. https://doi.org/10.1016/j.apenergy.2016.05.040
- [14] S. T. Germann and R. Isermann, “Determination of the centre of gravity height of a vehicle with parameter estimation,” IFAC Proc. Volumes, Vol.27, No.8, pp. 563-568, 1994. https://doi.org/10.1016/S1474-6670(17)47768-8
- [15] M. H. Zaheer and P. Yoon, “Estimation of mobile robot’s center of gravity for rollover detection,” Proc. 2020 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 1567-1572, 2020. https://doi.org/10.1109/AIM43001.2020.9159030
- [16] Y. Yu, K. Fukuda, and S. Tsujio, “Estimation of mass and center of gravity of graspless unknown object using gravity equi-effect planes,” Proc. 1998 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.3, pp. 1497-1502, 1998. https://doi.org/10.1109/IROS.1998.724807
- [17] M. Hatano, “Estimation of center of gravity for withdrawal works of unknown indefinite shape rubbles for rescue robots,” Proc. 2017 IEEE Int. Conf. on Mechatronics and Automation, pp. 1970-1975, 2017. https://doi.org/10.1109/ICMA.2017.8016120
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.