Paper:
Finite Element Analysis and Structural Modification of Catheter-Type Tactile Sensor Based on Polyvinylidene Fluoride Film
Kazuto Takashima*
 , Siyan Zhang*, Souichiro Nagano*, Makoto Takenaka**, and Kenji Ishida***
, Siyan Zhang*, Souichiro Nagano*, Makoto Takenaka**, and Kenji Ishida***
*Graduate School of Life Science and Systems Engineering, Kyushu Institute of Technology
2-4 Hibikino, Wakamatsu-ku, Kitakyushu, Fukuoka 808-0196, Japan
**Kagawa Prefectural Industrial Technology Center
587-1 Goto-cho, Takamatsu, Kagawa 761-8031, Japan
***Department of Applied Quantum Physics and Nuclear Engineering, Faculty of Engineering, Kyushu University
744 Motooka, Nishi-ku, Fukuoka, Fukuoka 819-0395, Japan

To enable quantitative palpation in vivo, we previously developed a catheter-type tactile sensor that uses a polyvinylidene fluoride (PVDF) film for detecting lesions based on surface changes. This study investigates the effects of the structural parameters for the sensor on the piezoelectric output. A coupled electrical-structural finite element analysis (FEA) is used to simulate the displacement of a sensor tip composed of silicone rubber layers, a PVDF film, and a plastic substrate film. The FEA results indicated that encapsulating the plastic film in rubber increased the output charge by approximately 56.5%, primarily due to enhanced strain caused by lateral expansion of the silicone rubber. Increasing the plastic film thickness and the distance between the neutral plane and the PVDF film was also found to increase the output charge. In addition, the sensor output was larger when the lower rubber layer was made thicker than the upper rubber layer. However, the material used for the substrate film was predicted to have the dominant effect on the sensor output, with the largest output being achieved for a film with a large Young’s modulus. To confirm the FEA results, we fabricated prototype sensors that used plastic, steel, and titanium films, and experimentally evaluated their performance. The results indicated that an appropriate choice of film material could increase the sensor output by 18.9 fold.
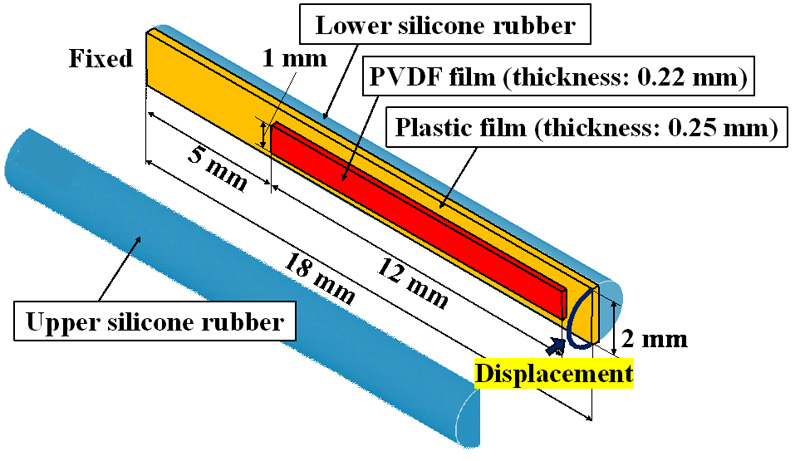
Schematic of simulation model for FEA
- [1] W. Othman et al., “Tactile sensing for minimally invasive surgery: Conventional methods and potential emerging tactile technologies,” Front. Robot. AI, Vol.8, Article No.705662, 2022. https://doi.org/10.3389/frobt.2021.705662
- [2] M. E. H. Eltaib and J. R. Hewit, “Tactile sensing technology for minimal access surgery–A review,” Mechatronics, Vol.13, No.10, pp. 1163-1177, 2003. https://doi.org/10.1016/S0957-4158(03)00048-5
- [3] B. Ren et al., “The critical technologies of vascular interventional robotic catheterization: A review,” IEEE Sens. J., Vol.23, No.24, pp. 30051-30069, 2023. https://doi.org/10.1109/JSEN.2023.3320356
- [4] M. Tanimoto et al., “Micro force sensor for intravascular neurosurgery and in vivo experiment,” Proc. IEEE 11th Annu. Int. Workshop Micro Electro Mech. Syst. (MEMS), pp. 504-509, 1998. https://doi.org/10.1109/MEMSYS.1998.659809
- [5] Y. Haga, T. Mineta, and M. Esashi, “Active catheter, active guide wire and related sensor systems,” Proc. 5th Biannu. World Autom. Congr., pp. 291-296, 2002. https://doi.org/10.1109/WAC.2002.1049455
- [6] P. Polygerinos et al., “Novel miniature MRI-compatible fiber-optic force sensor for cardiac catheterization procedures,” Proc. 2010 IEEE Int. Conf. Robot. Autom. (ICRA), pp. 2598-2603, 2010. https://doi.org/10.1109/ROBOT.2010.5509416
- [7] T. Sekitani, U. Zschieschang, H. Klauk, and T. Someya, “Flexible organic transistors and circuits with extreme bending stability,” Nat. Mater., Vol.9, No.12, pp. 1015-1022, 2010. https://doi.org/10.1038/nmat2896
- [8] K. Takashima et al., “Development of catheter-type tactile sensor composed of polyvinylidene fluoride (PVDF) film,” ROBOMECH J., Vol.6, Article No.19, 2019. https://doi.org/10.1186/s40648-019-0147-9
- [9] K. Takashima, M. Watanabe, K. Inoue, S. Horie, and K. Ishida, “Fabrication and evaluation of catheter-type tactile sensor composed of two polyvinylidene fluoride films,” 61st Annu. Conf. Soc. Instrum. Control Eng. (SICE), pp. 1165-1170, 2022. https://doi.org/10.23919/SICE56594.2022.9905774
- [10] K. Takashima, S. Nagano, M. Watanabe, and K. Ishida, “Characterization of catheter-type tactile sensor using polyvinylidene fluoride (PVDF) film,” J. Robot. Mechatron., Vol.36, No.4, pp. 899-908, 2024. https://doi.org/10.20965/jrm.2024.p0899
- [11] K. Takashima et al., “Measurement of the piezoelectric properties of vinylidene fluoride oligomer using pneumatic pressure for tactile sensors,” J. Solid Mech. Mater. Eng., Vol.6, No.10, pp. 975-988, 2012. https://doi.org/10.1299/jmmp.6.975
- [12] T. Okuyama, M. Sone, Y. Tanahashi, and M. Tanaka, “Palpation sensor using two PVDF films,” ICMIT 2009: Mechatron. Inf. Technol. (Proc. SPIE, Vol.7500), Article No.75000J, 2010. https://doi.org/10.1117/12.858316
- [13] I. Fujimoto, Y. Yamada, T. Maeno, T. Morizono, and Y. Umetani, “Identification of incipient slip phenomena based on the circuit output signals of PVDF film strips embedded in artificial finger ridges,” Trans. Soc. Instrum. Control Eng., Vol.40, No.6, pp. 648-655, 2004. https://doi.org/10.9746/sicetr1965.40.648
- [14] W. Feng, H. Wang, S. Guo, K. Wang, and X. Ye, “Design and experiments of a catheter side wall tactile sensor for minimum invasive surgery,” 2007 Int. Conf. Mechatron. Autom., pp. 1073-1078, 2007. https://doi.org/10.1109/ICMA.2007.4303697
- [15] Z. Chen, K.-Y. Kwon, and X. Tan, “Integrated IPMC/PVDF sensory actuator and its validation in feedback control,” Sens. Actuators A: Phys., Vol.144, No.2, pp. 231-241, 2008. https://doi.org/10.1016/j.sna.2008.01.023
- [16] M. Tanaka, “Sensor system for measuring human touch sensation,” J. Robot. Soc. Jpn., Vol.26, No.3, pp. 230-233, 2008 (in Japanese). https://doi.org/10.7210/jrsj.26.230
- [17] R. Kikuuwe, K. Nakamura, and M. Yamamoto, “Finger-mounted tactile sensor for evaluating surfaces,” J. Robot. Mechatron., Vol.24, No.3, pp. 430-440, 2012. https://doi.org/10.20965/jrm.2012.p0430
- [18] Z. Yi, Y. Zhang, and J. Peters, “Bioinspired tactile sensor for surface roughness discrimination,” Sens. Actuators A: Phys., Vol.255, pp. 46-53, 2017. https://doi.org/10.1016/j.sna.2016.12.021
- [19] X. L. Sun, J. P. Yan, Y. F. Li, and H. Liu, “Multi-frequency ultrasound transducers for medical applications: A survey,” Int. J. Intell. Robot. Appl., Vol.2, No.3, pp. 296-312, 2018. https://doi.org/10.1007/s41315-018-0057-7
- [20] K. Tsukagoshi, T. Hashimoto, and T. Koike, “Simultaneous measurement of swallowing sound and mechanomyogram of submental muscle with PVDF film,” 40th Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. (EMBC), pp. 3310-3313, 2018. https://doi.org/10.1109/EMBC.2018.8512959
- [21] R. Lin et al., “Applications of flexible electronics related to cardiocerebral vascular system,” Mater. Today Bio, Vol.23, Article No.100787, 2023. https://doi.org/10.1016/j.mtbio.2023.100787
- [22] Q. Zhang et al., “Hierarchically structured hollow PVDF nanofibers for flexible piezoelectric sensor,” Chem. Eng. J., Vol.498, Article No.155661, 2024. https://doi.org/10.1016/j.cej.2024.155661
- [23] A. Kanwal et al., “A comprehensive review of piezoelectric BaTiO_{3}-based polymer composites for smart tactile sensing,” Emergent Mater., Vol.8, No.8, pp. 6137-6176, 2025. https://doi.org/10.1007/s42247-025-01208-3
- [24] R. Ybarra et al., “Advanced microstructured BaTiO_{3}-embedded PVDF-HFP/PEO film for enhanced triboelectric interface in self-sufficient energy generation and sensing,” ACS Omega, Vol.10, No.38, pp. 43450-43461, 2025. https://doi.org/10.1021/acsomega.5c01183
- [25] S. Horii and T. Nakamura, “An in-pipe mobile robot for use as an industrial endoscope based on an earthworm’s peristaltic crawling,” J. Robot. Mechatron., Vol.24, No.6, pp. 1054-1062, 2012. https://doi.org/10.20965/jrm.2012.p1054
- [26] R. Okuma, S. Matsuo, F. Ito, and T. Nakamura, “Development of a robot combining a hyper-extension unit and an earthworm-type robot enhancing propulsion and traction,” J. Robot. Mechatron., Vol.37, No.1, pp. 86-98, 2025. https://doi.org/10.20965/jrm.2025.p0086
- [27] Y. Suzuki, “Development of a tactile sensor for a snake robot,” J. Robot. Soc. Jpn., Vol.37, No.5, pp. 414-417, 2019 (in Japanese). https://doi.org/10.7210/jrsj.37.414
- [28] The Japan Society of Mechanical Engineers (Ed.), “JSME Mechanical Engineers’ Handbook DVD-ROM,” Maruzen Publishing, Co., Ltd., 2014 (in Japanese).
- [29] National Astronomical Observatory of Japan (Ed.), “Chronological Scientific Tables,” Vol.77, Maruzen Co. Ltd., 2003 (in Japanese).
- [30] J. Deng, O. Guasch, L. Zheng, T. Song, and Y. Cao, “Semi-analytical model of an acoustic black hole piezoelectric bimorph cantilever for energy harvesting,” J. Sound Vib., Vol.494, Article No.115790, 2021. https://doi.org/10.1016/j.jsv.2020.115790
- [31] ANSYS Website. https://ansyshelp.ansys.com/public/account/secured?returnurl=/////////Views/Secured/corp/v242/en/ans_elem/Hlp_E_SOLID226.html [Accessed February 13, 2026]
- [32] ANSYS Website. https://ansyshelp.ansys.com/public/account/secured?returnurl=/////////Views/Secured/corp/v242/en/ans_elem/Hlp_E_SOLID186.html [Accessed February 13, 2026]
- [33] Kureha Trading Website (in Japanese). https://www.kureha-trading.co.jp/catalog/ [Accessed February 13, 2026]
- [34] Shin-Etsu Chemical Website (in Japanese). https://www.silicone.jp/catalog/pdf/LiquidSiliconeRubbers-ind_J.pdf [Accessed February 13, 2026]
- [35] NF Website. https://www.nfcorp.co.jp/english/pro/mi/loc/pre/li_76/specifications.html [Accessed February 13, 2026]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.