Paper:
Soil-Adaptive Autonomous Excavation: Bulking Factor-Based Soil Density Estimation and Excavation Path Optimization with a Genetic Algorithm
Ryosuke Yajima*1, Shinya Katsuma*1, Shunsuke Hamasaki*2, Pang-jo Chun*1
 , Keiji Nagatani*1,*3
, Genki Yamauchi*4
, Takeshi Hashimoto*4
, Atsushi Yamashita*5
, and Hajime Asama*6
, Keiji Nagatani*1,*3
, Genki Yamauchi*4
, Takeshi Hashimoto*4
, Atsushi Yamashita*5
, and Hajime Asama*6
*1Graduate School of Engineering, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan
*2Faculty of Science and Engineering, Chuo University
1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan
*3Faculty of Systems and Information Engineering, University of Tsukuba
1-1-1 Tennodai, Tsukuba, Ibaraki 305-8577, Japan
*4Public Works Research Institute
1-6 Minamihara, Tsukuba, Ibaraki 305-8516, Japan
*5Graduate School of Frontier Sciences, The University of Tokyo
5-1-5 Kashiwanoha, Kashiwa, Chiba 277-8561, Japan
*6Tokyo College, Institutes for Advanced Study, The University of Tokyo
7-3-1 Hongo, Bunkyo-ku, Tokyo 113-8656, Japan

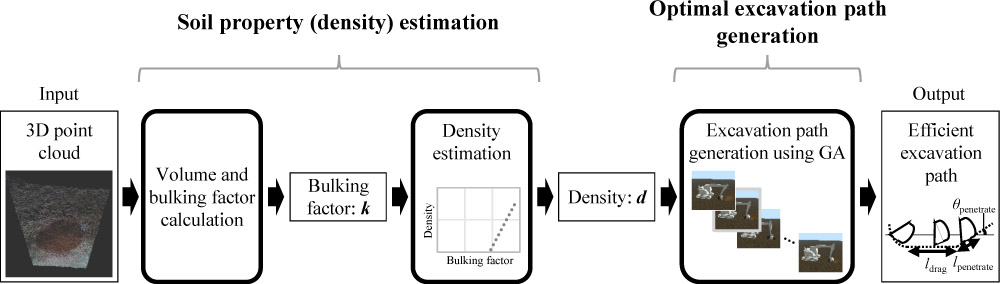
In this study, we present a novel autonomous excavation method that achieves high efficiency under varying soil conditions. This method consists of two main steps, including first estimating the density of the soil and then generating an optimal excavation path based on the estimated density. The proposed method estimates soil density by taking advantage of the bulking phenomenon, which refers to an increase in the volume of excavated soil. This estimation relies solely on 3D point-cloud data obtained before and after excavation. Using the estimated soil density, an optimal excavation path is generated by applying a genetic algorithm in a physics simulator that replicates both the hydraulic excavator and the target ground. The algorithm explores a range of paths over multiple generations to find one that maximizes efficiency. The effectiveness of the proposed method was verified through simulations and field experiments. In particular, field experiments conducted in soft soil showed that the proposed method improved excavation efficiency by 27.7% compared with a baseline method using fixed parameters.
Autonomous excavation planning method
- [1] B. Filipe, J. Woetzel, and J. Mischke, “Reinventing Construction: A Route of Higher Productivity,” McKinsey Global Institute, 2017.
- [2] T. Hashimoto, M. Yamada, G. Yamauchi, Y. Nitta, and S. Yuta, “Proposal for Automation System Diagram and Automation Levels for Earthmoving Machinery,” Proc. of the 37th Int. Symposium on Automation and Robotics in Construction (ISARC 2020), pp. 347-352, 2020. https://doi.org/10.22260/ISARC2020/0050
- [3] A. Stentz, J. Bares, S. Singh, and P. Rowe, “A Robotic Excavator for Autonomous Truck Loading,” Autonomous Robots, Vol.7, pp. 175-186, 1999. https://doi.org/10.1023/A:1008914201877
- [4] Y. Yang, L. Zhang, X. Cheng, J. Pan, and R. Yang, “Compact Reachability Map for Excavator Motion Planning,” Proc. of the 2019 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 2308-2313, 2019. https://doi.org/10.1109/IROS40897.2019.8968050
- [5] S. Yoo, C.-G. Parks, S. H. You, and B. Lim, “A Dynamics-based Optimal Trajectory Generation for Controlling an Automated Excavator,” Proc. of the Institution of Mechanical Engineers, Part C: J. of Mechanical Engineering Science, Vol.224, Issue 10, pp. 2109-2119, 2010. https://doi.org/10.1243/09544062JMES2032
- [6] H. Yamamoto, M. Moteki, H. Shao, K. Ootuki, Y. Yanagisawa, Y. Sakaida, A. Nozue, T. Yamaguchi, and S. Yuta, “Development of the Autonomous Hydraulic Excavator Prototype Using 3-D Information for Motion Planning and Control,” Proc. of the 2010 IEEE/SICE Int. Symposium on System Integration, pp. 49-54, 2010. https://doi.org/10.1109/SII.2010.5708300
- [7] R. J. Sandzimier and H. H. Asada, “A Data-Driven Approach to Prediction and Optimal Bucket-Filling Control for Autonomous Excavators,” IEEE Robotics and Automation Letters, Vol.5, No.2, pp. 2682-2689, 2020. https://doi.org/10.1109/LRA.2020.2969944
- [8] Y. B. Kim, J. Ha, H. Kang, P. Y. Kim, J. Park, and F. C. Park, “Dynamically Optimal Trajectories for Earthmoving Excavators,” Automation in Construction, Vol.35, pp. 568-578, 2013. https://doi.org/10.1016/j.autcon.2013.01.007
- [9] S. Lee, D. Hong, H. Park, and J. Bae, “Optimal Path Generation for Excavator with Neural Networks Based Soil Models,” Proc. of the 2008 IEEE Int. Conf. on Multisensor Fusion and Integration for Intelligent Systems, pp. 632-637, 2008. https://doi.org/10.1109/MFI.2008.4648015
- [10] A. R. Reece, “Paper 2: The Fundamental Equation of Earth-Moving Mechanics,” Proc. of the Institution of Mechanical Engineers, Vol.179, Issue 6, pp. 16-22, 1964. https://doi.org/10.1243/PIME_CONF_1964_179_134_02
- [11] O. Luengo, S. Singh, and H. Cannon, “Modeling and Identification of Soil-tool Interaction in Automated Excavation,” Proc. of the 1998 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1900-1906, 1998. https://doi.org/10.1109/IROS.1998.724873
- [12] O. M. U. Eraliev, K.-H. Lee, D.-Y. Shin, and C.-H. Lee, “Sensing, perception, decision, planning and action of autonomous excavators,” Automation in Construction, Vol.141, Article No.104428, 2022. https://doi.org/10.1016/j.autcon.2022.104428
- [13] C. Henderson, A. Levett, and D. Lisle, “The Effects of Soil Water Content and Bulk Density on the Compactibility and Soil Penetration Resistance of Some Western Australian Sandy Soils,” Australian J. of Soil Research, Vol.26, Issue 2, pp. 391-400, 1988. https://doi.org/10.1071/SR9880391
- [14] R. Horn, T. Way, and J. Rostek, “Effect of Repeated Tractor Wheeling on Stress/strain Properties and Consequences on Physical Properties in Structured Arable Soils,” Soil & Tillage Research, Vol.73, Nos.1-2, pp. 101-106, 2003. https://doi.org/10.1016/S0167-1987(03)00103-X
- [15] A. A. G. Al-shammary, A. Z. Kouzani, A. Kaynak, S. Y. Khoo, M. Norton, and W. Gates, “Soil Bulk Density Estimation Methods: A Review,” Pedosphere, Vol.28, Issue 4, pp. 581-596, 2018. https://doi.org/10.1016/S1002-0160(18)60034-7
- [16] A. Nelson, “Dictionary of Mining,” George Newnes, 1965.
- [17] A. Heit, “An Investigation into the Parameters That Affect the Swell Factor Used in Volume and Design Calculations at Callide Open Cut Coal Mine,” Ph.D. Thesis, University of Southern Queensland, 2011.
- [18] C. Wang and Y. K. Cho, “Smart Scanning and Near Real-time 3D Surface Modeling of Dynamic Construction Equipment from a Point Cloud,” Automation in Construction, Vol.49, Part B, pp. 239-249, 2015. https://doi.org/10.1016/j.autcon.2014.06.003
- [19] J. Yang, M.-W. Park, P. A. Vela, and M. Golparvar-Fard, “Construction Performance Monitoring via Still Images, Time-lapse Photos, and Video Streams: Now, Tomorrow, and the Future,” Advanced Engineering Informatics, Vol.29, Issue 2, pp. 211-224, 2015. https://doi.org/10.1016/j.aei.2015.01.011
- [20] C. Yuan, S. Li, and H. Cai, “Vision-Based Excavator Detection and Tracking Using Hybrid Kinematic Shapes and Key Nodes,” J. of Computing in Civil Engineering, Vol.31, Issue 1, Article No.04016038, 2016. https://doi.org/10.1061/(ASCE)CP.1943-5487.0000602
- [21] Y. Sakaida, D. Chugo, H. Yamamoto, and H. Asama, “The Analysis of Excavator Operation by Skillful Operator – Extraction of Common Skills –,” Proc. of the SICE Annual Conf., pp. 538-542, 2008. https://doi.org/10.1109/SICE.2008.4654714
- [22] F. E. Sotiropoulos and H. H. Asada, “A Model-Free Extremum-Seeking Approach to Autonomous Excavator Control Based on Output Power Maximization,” IEEE Robotics and Automation Letters, Vol.4, Issue 2, pp. 1005-1012, 2019. https://doi.org/10.1109/LRA.2019.2893690
- [23] J. H. Holland, “Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence,” The University of Michigan Press, 1975.
- [24] D. Holz, T. Beer, and T. W. Kuhlen, “Soil Deformation Models for Real-Time Simulation: A Hybrid Approach,” Proc. of Workshop in Virtual Reality Interactions and Physical Simulations (VRIPHYS2009), 2009. https://doi.org/10.2312/PE/vriphys/vriphys09/021-030
- [25] ROS – Robot Operating System. https://www.ros.org [Accessed May 2, 2025]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.