Paper:
Mobile Robot Utilizing the Rotational Motion of its Arms —Effect of Applying an Oscillation Mechanism—
Ryota Hayashi*1, Ryo Oishi*2, Yasuyuki Setoyama*3, Koji Yoshida*1, and Tetsuya Kinugasa*4

*1Department of Mechanical Systems Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama, Okayama 700-0005, Japan
*2Graduate School of Science and Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama, Okayama 700-0005, Japan
*3Department of Electronic Control Engineering, National Institute of Technology, Kagoshima College
1460-1 Shinko, Hayato-cho, Kirishima, Kagoshima 899-5193, Japan
*4Department of Robotics, Kindai University
1 Takaya Umenobe, Higashi-Hiroshima, Hiroshima 739-2116, Japan

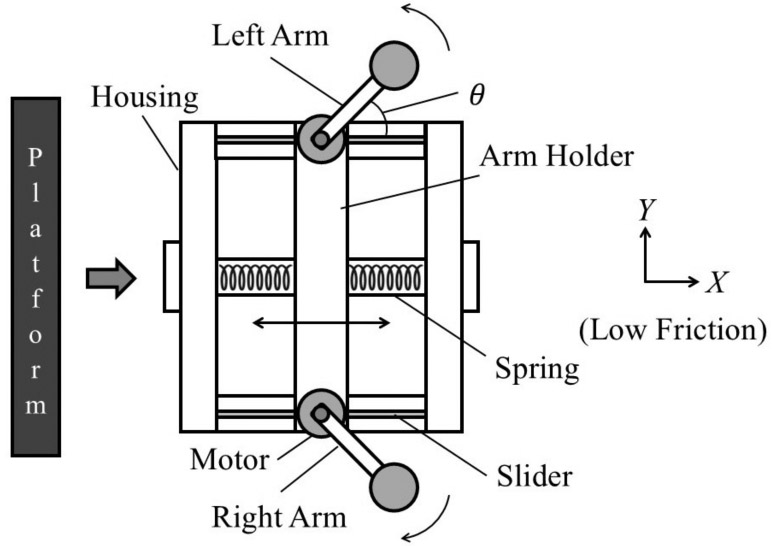
In this study, we propose a mobile robot that can start moving by utilizing the rotational movements of its two arms. The robot has two rotating arms and a body. It is equipped with a device that can fix its body to a platform constructed on a wall or floor. When the body is fixed to the platform, the robot can store the kinetic momentum of its center of mass by rotating its arms. When the body is released from the platform, the robot begins to move along the kinetic momentum of its center of mass. In our previous study, we demonstrated the feasibility of a mobile robot that hopped up and down the steps under Earth’s gravity, and we assessed its performance of the robot by performing numerical simulations. In the present study, we evaluated the performance of the mobile robot as it moved on a flat, low-friction floor, and we assessed the implementability of a device capable of fixing the robot’s body to a platform, by conducting a round-trip movement experiment. Furthermore, we proposed a modified mobile robot equipped with an oscillation mechanism and verified the feasibility of the modified mobile robot through comparative experiments.
Oscillating arm-rotation mobile robot
- [1] T. Yoshimitsu, T. Kubota, and I. Nakatani, “MINERVA rover which became a small artificial solar satellite,” Proc. of the 20th Annual AIAA/USU Conf. on Small Satellites, Article No.SSC06-IV-4, 2006.
- [2] K. Nagaoka and K. Yoshida, “Modeling and analysis of ciliary micro-hopping locomotion actuated by an eccentric motor in a microgravity,” 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 763-768, 2013. https://doi.org/10.1109/IROS.2013.6696437
- [3] M. Kurisu, “Design of a hopping mechanism using permanent magnets for small-scale exploration rovers,” 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 2355-2360, 2014. https://doi.org/10.1109/IROS.2014.6942881
- [4] G. Kato, H. Kojima, M. Yoshida, and Y. Wakabayashi, “Experiments on motion control of two-joint articulated hopping robot with stopper mechanisms,” J. Robot. Mechatron., Vol.17, No.1, pp. 89-100, 2005. https://doi.org/10.20965/jrm.2005.p0089
- [5] Y. Asai et al., “Wheel-based stair climbing robot with hopping mechanism – Demonstration of Continuous Stair Climbing Using Vibration –,” J. Robot. Mechatron., Vol.20, No.2, pp. 221-227, 2008. https://doi.org/10.20965/jrm.2008.p0221
- [6] M. Ishikawa, R. Kitayoshi, and T. Sugie, “Volvot: A spherical mobile robot with eccentric twin rotors,” 2011 IEEE Int. Conf. on Robotics and Biomimetics, pp. 1462-1467, 2011. https://doi.org/https://doi.org/10.1109/ROBIO.2011.6181496
- [7] T. Hirano, M. Ishikawa, and K. Osuka, “Cubic mobile robot under rolling constraints,” Proc. of the 21st Int. Symp. on Mathematical Theory of Networks and Systems, pp. 618-621, 2014.
- [8] G.-P. Jung et al., “JumpRoACH: A trajectory-adjustable integrated jumping-crawling robot,” IEEE/ASME Trans. on Mechatronics, Vol.24, No.3, pp. 947-958, 2019. https://doi.org/10.1109/TMECH.2019.2907743
- [9] Y. Liu et al., “Direction and trajectory tracking control for nonholonomic spherical robot by combining sliding mode controller and model prediction controller,” IEEE Robotics and Automation Letters, Vol.7, No.4, pp. 11617-11624, 2022. https://doi.org/10.1109/LRA.2022.3203224
- [10] Y. Hu, H. Liu, and H. Yuan, “A portable cable-suspended parallel robot and its applications in indoor inspection,” IEEE Robotics and Automation Letters, Vol.9, No.11, pp. 10644-10651, 2024. https://doi.org/10.1109/LRA.2024.3469819
- [11] R. Hayashi and S. Tsujio, “High-performance jumping movements by pendulum-type jumping machines,” Proc. 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium, Vol.2, pp. 722-727, 2001. https://doi.org/10.1109/IROS.2001.976254
- [12] R. Hayashi, H. Okayama, S. Tsujio, and Y. Yu, “Realization of ascending stairs by the pendulum-type jumping machine,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.74, No.748, pp. 2968-2975, 2008 (in Japanese). https://doi.org/10.1299/kikaic.74.2968
- [13] R. Hayashi, Y. Setoyama, T. Kinugasa, and K. Yoshida, “Mobile robot utilizing arm rotations – Performance of mobile robot under a gravity environment –,” J. Robot. Mechatron., Vol.32, No.1, pp. 254-263, 2020. https://doi.org/10.20965/jrm.2020.p0254
- [14] R. Hayashi, Y. Tanaka, Y. Setoyama, T. Kinugasa, and K. Yoshida, “Mobile robot utilizing rotational movements of the arms: Control of moving direction and reduction of collision impact,” Artificial Life and Robotics, Vol.25, No.3, pp. 400-406, 2020. https://doi.org/10.1007/s10015-020-00607-5
- [15] R. Oishi, R. Hayashi, Y. Setoyama, K. Yoshida, and T. Kinugasa, “Mobile robot using rotational movements of the arms – Possibility of model with oscillation mechanism –,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (ROBOMECH2024), Article No.2A2-E08, 2024 (in Japanese). https://doi.org/10.1299/jsmermd.2024.2A2-E08
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.