Paper:
Development of a Biomimetic Wire-Driven Fish Robot with Flexible Outer Skin for Carangiform Swimming
Daisuke Nakanishi
 , Shota Watanabe, Araki Ishitobi, and Kohei Ishihara
, Shota Watanabe, Araki Ishitobi, and Kohei Ishihara
National Institute of Technology, Matsue College
14-4 Nishi-Ikumacho, Matsue, Shimane 690-8518, Japan

Screw propellers, while commonly used in underwater propulsion, suffer from issues such as entanglement, noise, and reduced visibility. In contrast, fish tail fin propulsion offers minimal environmental impact, superior obstacle avoidance, and high maneuverability in confined spaces, thus exhibiting excellent compatibility with underwater environments. Consequently, fish-like robots are considered promising for underwater exploration in disaster zones and ecological surveys. Although various fish-like robots have been developed, replicating the smooth, continuous streamlined shape of real fish using multi-link structures remains challenging. While flexible materials have been employed to create continuous structures, issues concerning body shape and surface integrity during swimming persist. Therefore, this study aims to develop a robot that maintains a continuous streamlined body shape using a silicone-based outer skin. The robot’s external shape is designed based on 3D scan data of Japanese horse mackerel, and a wire-driven bending mechanism with a flexible outer skin that prevents wrinkling during bending is developed. Swimming experiments demonstrated that the developed robot maintained a smooth and continuous body structure without wrinkles during bending, successfully replicating carangiform swimming, particularly the coordinated movement of the tail fin and body. Furthermore, the relationship between the robot’s swimming speed and tail fin frequency closely matched that of a real horse mackerel, confirming the achievement of efficient swimming.
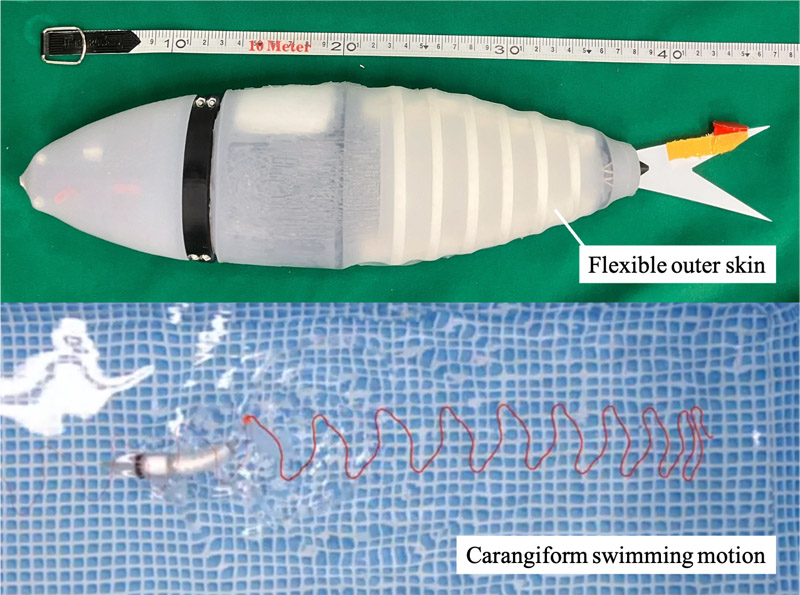
Wire-driven fish robot with flexible outer skin
- [1] H. Yamagata, S. Kochii, H. Yoshida, Y. Nogi, and T. Maki, “Development of AUV MONACA – Hover-Capable Platform for Detailed Observation Under Ice –,” J. Robot. Mechatron., Vol.33, No.6, pp. 1223-1233, 2021. https://doi.org/10.20965/jrm.2021.p1223
- [2] A. Okamoto, M. Imasato, S. C. Hirao, H. Sekiguchi, T. Seta, M. Sasano, and T. Fujiwara, “Development of Testbed AUV for Formation Control and its Fundamental Experiment in Actual Sea Model Basin,” J. Robot. Mechatron., Vol.33, No.1, pp. 151-157, 2021. https://doi.org/10.20965/jrm.2021.p0151
- [3] R. Miyakawa, S. Yamada, K. Sugimoto, K. Ishii, and Y. Nishida, “Sargassum Bed Survey Using AUV with a Disturbance Observer for Tidal Currents Estimation,” J. Robot. Mechatron., Vol.37, No.1, pp. 240-248, 2025. https://doi.org/10.20965/jrm.2025.p0240
- [4] F. E. Fish, “Advantages of Natural Propulsive Systems,” Marine Technology Society J., Vol.47, No.5, pp. 37-44, 2013. https://doi.org/10.4031/MTSJ.47.5.2
- [5] P. Bandyopadhyay, “Trends in Biorobotic Autonomous Undersea Vehicles,” IEEE J. of Oceanic Engineering, Vol.30, Issue 1, pp. 109-139, 2005. https://doi.org/10.1109/JOE.2005.843748
- [6] P. L. Nguyen, B. R. Lee, and K. K. Ahn, “Thrust and swimming speed analysis of fish robot with non-uniform flexible tail,” J. of Bionic Engineering, Vol.13, No.1, pp. 73-83, 2016. https://doi.org/10.1016/S1672-6529(14)60161-X
- [7] K. Iguchi, T. Shimooka, S. Uchikai, Y. Konno, H. Tanaka, Y. Ikemoto, and J. Shintake, “Agile robotic fish based on direct drive of continuum body,” npj Robotics, Vol.2, No.1, Article No.7, 2024. https://doi.org/10.1038/s44182-024-00014-z
- [8] W. Zhao, A. Ming, M. Shimojo, Y. Inoue, and H. Maekawa, “Fluid-Structure Interaction Analysis of a Soft Robotic Fish Using Piezoelectric Fiber Composite,” J. Robot. Mechatron., Vol.26, No.5, pp. 638-648, 2014. https://doi.org/10.20965/jrm.2014.p0638
- [9] Z. Wang, G. Hang, J. Li, Y. Wang, and K. Xiao, “A micro-robot fish with embedded SMA wire actuated flexible biomimetic fin,” Sensors and Actuators A: Physical, Vol.144, Issue 2, pp. 354-360, 2008. https://doi.org/10.1016/j.sna.2008.02.013
- [10] D. Nakanishi, S. Kobayashi, K. Obara, S. Matsumura, and Y. Sueoka, “Development of a Fish-Like Robot with a Continuous and High Frequency Snap-Through Buckling Mechanism Using a Triangular Cam,” J. Robot. Mechatron., Vol.33, No.2, pp. 400-409, 2021. https://doi.org/10.20965/jrm.2021.p0400
- [11] K. Hirata, T. Takimoto, and K. Tamura, “Study on Turning Performance of a Fish Robot,” 1st Int. Symp. on Aqua Bio-Mechanisms, pp. 287-292, 2000.
- [12] J. Yu, M. Tan, S. Wang, and E. Chen, “Development of a Biomimetic Robotic Fish and Its Control Algorithm,” IEEE Trans. on Systems, Man and Cybernetics, Part B (Cybernetics), Vol.34, Issue 4, pp. 1798-1810, 2004. https://doi.org/10.1109/TSMCB.2004.831151
- [13] Y. Takada, K. Koyama, and T. Usami, “Robotic Fish,” J. Robot. Mechatron., Vol.26, No.3, pp. 391-393, 2014. https://doi.org/10.20965/jrm.2014.p0391
- [14] D. Nakanishi and Y. Yoshioka, “Development of Continuous Snap-through Buckling Driven Fish Robot with Large Trapezoidal Elastic Sheet,” Trans. of the Society of Instrument and Control Engineers, Vol.60, Issue 1, pp. 70-72, 2024. https://doi.org/10.9746/sicetr.60.70
- [15] J. Z. Zhang, Y. Zhang, P. Ma, E. Nava, T. Du, P. Arm, W. Matusik, and R. K. Katzschmann, “Sim2Real for Soft Robotic Fish via Differentiable Simulation,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 12598-12605, 2022. https://doi.org/10.1109/IROS47612.2022.9981338
- [16] S.-D. Gravert, M. Y. Michelis, S. Rogler, D. Tscholl, T. Buchner, and R. K. Katzschmann, “Planar Modeling and Sim-to-Real of a Tethered Multimaterial Soft Swimmer Driven by Peano-HASELs,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 9417-9423, 2022. https://doi.org/10.1109/IROS47612.2022.9981192
- [17] C. Rossi, J. Colorado, W. Coral, and A. Barrientos, “Bending continuous structures with SMAs: A novel robotic fish design,” Bioinspiration & Biomimetics, Vol.6, No.4, Article No.045005, 2011. https://doi.org/10.1088/1748-3182/6/4/045005
- [18] S. C. van den Berg, R. B. Scharff, Z. Rusák, and J. Wu, “OpenFish: Biomimetic design of a soft robotic fish for high speed locomotion,” HardwareX, Vol.12, Article No.e00320, 2022. https://doi.org/10.1016/j.ohx.2022.e00320
- [19] R. K. Katzschmann, J. DelPreto, R. MacCurdy, and D. Rus, “Exploration of underwater life with an acoustically controlled soft robotic fish,” Science Robotics, Vol.3, Issue 16, Article No.eaar3449, 2018. https://doi.org/10.1126/scirobotics.aar3449
- [20] I. Yamamoto and T. Hiratsuka, “Research and Development of Robotic Fish Based on Elastic Oscillation Fin System,” Proc. of the 2012 World Congress on Advances in Civil, Environmental, and Materials Research (ACEM’12), pp. 1820-1834, 2012.
- [21] Z. Chen, X. Tian, X. Chen, B. Wen, and X. Li, “An experimental study of the wire-driven compliant robotic fish,” Ocean Engineering, Vol.279, Article No.114433, 2023. https://doi.org/10.1016/j.oceaneng.2023.114433
- [22] M. Shibata, “Fish-Like Robot with a Deformable Body Fabricated Using a Silicone Mold,” J. Robot. Mechatron., Vol.34, No.1, pp. 40-46, 2022. https://doi.org/10.20965/jrm.2022.p0040
- [23] C. M. Breder Jr., “The locomotion of fishes,” Zoologica: Scientific Contributions of the New York Zoological Society, Vol.4, Issue 5, pp. 159-297, 1926. https://doi.org/10.5962/p.203769
- [24] Y. Takada, Y. Nakanishi, R. Araki, and T. Wakisaka, “Investigation of Propulsive Force and Water Flow around a Small Fish Robot by PIV Measurement and Three-Dimensional Numerical Analysis (Mechanical Systems),” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.76, Issue 763, pp. 665-672, 2010 (in Japanese). https://doi.org/10.1299/kikaic.76.665
- [25] D. Nakanishi and K. Ishihara, “Development of snap-through buckling-driven fish-type robot with elastic outer skin,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec), Session ID 2P2-B10, 2024 (in Japanese). https://doi.org/10.1299/jsmermd.2024.2P2-B10
- [26] R. Bainbridge, “The Speed of Swimming of Fish as Related to Size and to the Frequency and Amplitude of the Tail Beat,” J. of Experimental Biology, Vol.35, Issue 1, pp. 109-133, 1958. https://doi.org/10.1242/jeb.35.1.109
- [27] I. Honda, O. Kawanami, and Y. Kawashima, “Numerical Visualization of Flow Around Oscillating Caudal Fin,” J. of the Visualization Society of Japan, Vol.30, Issue 119, pp. 22-27, 2010 (in Japanese). https://doi.org/10.3154/jvs.30.22
- [28] M. Yokota, K. Yamamoto, Y. Taira, T. Handa, and E. Morimoto, “Oxygen consumption and swimming ability of Trachurus japonicus,” J. of National Fisheries University, Vol.56, Issue 4, pp. 267-271, 2008.
- [29] G. Xu, T. Arimoto, and M. Inoue, “The measurements of swimming speed in jack mackerel Trachurus japonicus,” Nippon Suisan Gakkaishi, Vol.54, Issue 9, pp. 1493-1497, 1988 (in Japanese). https://doi.org/10.2331/suisan.54.1493
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.