Paper:
Two-Stage Spraying with Leaf-Turning Mechanism for Enhanced Coverage and Reduced Chemical Use
Hirofumi Ukai*, Kazuaki Hirasawa*, Soichiro Ikegami*, and Shuichi Nakagawa**
*Dynamics Group, Fundamental Technology Research Center, Research & Development Center, Innovation & Technology Division, Yanmar Holdings Co., Ltd.
2481 Umegahara, Maibara, Shiga 521-8511, Japan
**Research & Development Center, Innovation & Technology Division, Yanmar Holdings Co., Ltd.
2481 Umegahara, Maibara, Shiga 521-8511, Japan

Spraying agricultural chemicals is vital for maintaining crop yield and quality; however, it comes with its own set of challenges such as spray drift and rising costs. Despite advancements in autonomous vehicles that reduce the reliance on manual labor, issues related to pesticide spray volume and spray drift persist in robotic application systems. Hence, efficient spraying technology is essential for the uniform application of pesticides, especially in hedge-trained crops where dense canopies limit access to abaxial surfaces. Although conventional air-assisted spraying systems enhance coverage through high-velocity airflow and spray pressure, there is a practical limit to the spray volume reduction as insufficient spray volume can reduce penetration into dense and complex canopies. In this study, we propose a novel tractor-mounted two-stage spraying system with a leaf-turning mechanism designed for hedge-trained crops, targeting both adaxial and abaxial surfaces. Experiments were conducted under controlled laboratory conditions and real vineyard conditions, and the results showed that the proposed spraying system used only 60% of the spray volume compared with a conventional air-assisted spraying system, while achieving equivalent coverage on adaxial surfaces and a 6% improvement in coverage on abaxial surfaces. These findings suggest that the proposed spraying system can reduce spray drift while maintaining or improving spraying performance, primarily due to the reduced spray volume, minimized air–pesticide-droplet interactions, lower operating pressure, and limited air assistance range.
Two-stage spraying with leaf-turning mechanism
1. Introduction
Spraying agricultural chemicals is indispensable for maintaining crop yield and quality. Despite its benefits, this practice comes with its own set of challenges, most notably, spray drift, unintended dispersal of pesticides to nontarget areas. According to the Ministry of Agriculture, Forestry and Fisheries, Japan, the amount of spray drift is directly proportional to the spray volume 1. Although the adoption of autonomous vehicles reduces the reliance on manual labor in agricultural operations, challenges remain regarding pesticide usage and spray drift of robotic pesticide application systems 2. Moreover, the rising chemical costs, driven by the increased costs of raw materials, transportation, and energy, further intensify the economic pressure on farmers 3. Owing to these environmental and economic issues, there is an urgent need to minimize the pesticide spray volume, which is a strategy that is both ecologically important and cost-effective.
Efficient spraying technology is essential to achieve uniform pesticide application across crops while minimizing the total spray volume. A significant technical challenge is ensuring adequate deposition of pesticide on abaxial surfaces, particularly in hedge-trained crops where dense canopies hinder access 4,5. Air-assisted spraying is implemented to improve the coverage of pesticides on abaxial surfaces 6,7. Conventional air-assisted spraying systems such as speed sprayers combine high-velocity airflow with high-pressure spraying to facilitate the penetration of pesticides into dense canopies and improve their deposition on abaxial surfaces 4. Typically, airflow exceeding a velocity of 10–30 m/s is directed into the canopy from the spray nozzles, inducing leaf movement that temporarily exposes the otherwise concealed abaxial surfaces 8,9,10. Simultaneously, droplets generated at a pressure of 1.0–1.5 MPa acquire substantial initial velocity, striking leaf surfaces directly 11,12. These droplets then undergo multiple splashes within the turbulent and vortical airflow formed inside the canopy, increasing the likelihood of secondary adhesion to adjacent abaxial surfaces and interleaf gaps 13,14. This mechanism was reported to improve the coverage of abaxial surfaces by \(\sim\)10%–25% compared with single-pass spraying 4,8,9.
However, maintaining sufficient dynamic airflow and spray pressure requires a substantial spray volume. When the spray volume is reduced, the penetration capability of the spraying system into dense and complex canopies diminishes significantly, resulting in a marked decline in deposition efficiency. Consequently, there is a practical limit to the spray volume reduction, as the application rate is essential to ensure uniform coverage 15. Conventional air-assisted spraying systems, which produce high-velocity flows above a certain level, are widely known to significantly contribute to spray drift 16.
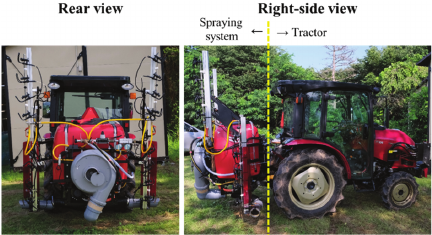
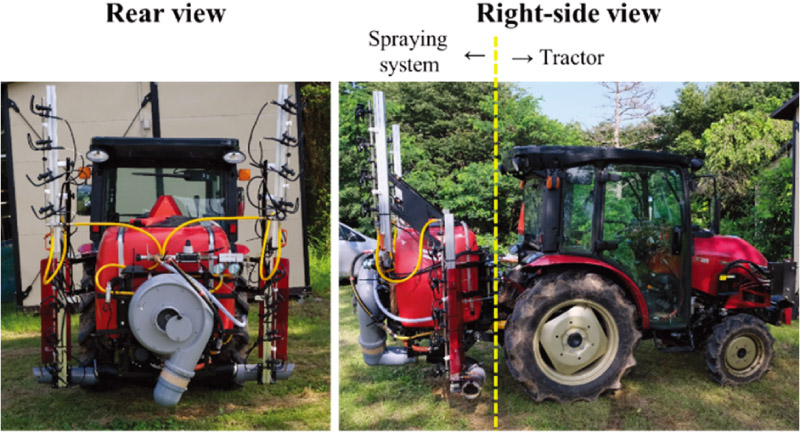
Fig. 1. Photographs of the tractor-mounted two-stage spraying system.
Table 1. Specifications of the tractor and two-stage spraying system.

Hence, in this study, we propose a tractor-mounted two-stage spraying system with an air-assisted leaf-turning mechanism designed for hedge-trained crops. This novel system achieves effective adhesion of pesticide to the abaxial surfaces while concurrently reducing the spray volume by (1) separately targeting adaxial and abaxial leaf surfaces to minimize the influence of airflow on spraying or the interactions between the two sprayings (two-stage spraying) and (2) minimizing reliance on the spray pressure and high-velocity airflow through the leaf-turning mechanism.
2. Research Object
The research object was a spraying system mounted on a tractor (Fig. 1). The specifications of the YT225 tractor and spraying system are listed in Table 1. The photographs of the tractor-mounted two-stage spraying system are shown in Fig. 1. The test field was a hedge-trained vineyard during the peak growing season. The specifications of the spraying target field are listed in Table 2 and the vineyard conditions at the time of testing are shown in Fig. 2.
3. Methods
3.1. Evaluation of the Spraying Performance
The spraying performance was evaluated based on the coverage, which is defined as the percentage of the leaf surface area in contact with the spray droplets. Spraying tests were conducted after water-sensitive papers (20301-2N Spraying Systems Co.) were attached to the adaxial and abaxial surfaces of the leaves at three canopy heights (upper, middle, and lower) and at both the exterior and interior positions for each height segment (Fig. 3(a)). The water-sensitive papers turned blue upon contact with the spray droplets and remained yellow elsewhere. After spraying, the water-sensitive papers were scanned and digitized, and the coverage was calculated using coverage calculation software developed by the National Agriculture and Food Research Organization 17. Fig. 3(b) shows visual examples with different levels of coverage.
Table 2. Specifications of the spraying target.


Fig. 2. Vineyard conditions at the time of testing.
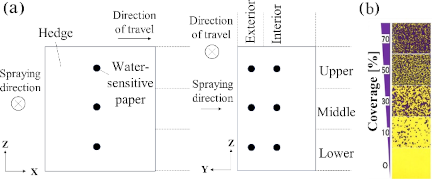
Fig. 3. (a) Overview of the locations where water-sensitive papers were attached. (b) Visual examples with different levels of coverage.
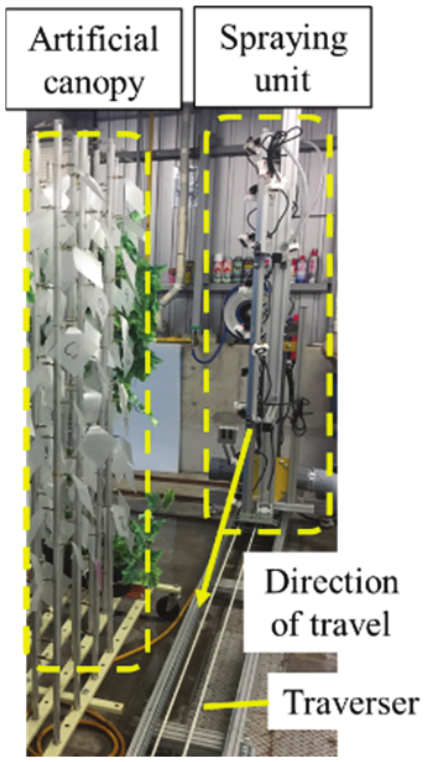
Fig. 4. Overview of the laboratory experimental setup.
Table 3. List of spray unit instruments used in the laboratory experiments.

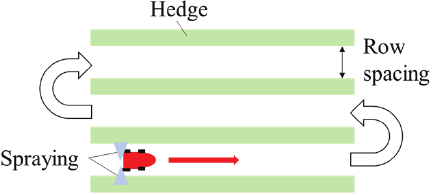
Fig. 5. Schematic diagram of the spraying practice.
3.2. Laboratory Experiments
The critical design parameters were determined in a controlled indoor environment without external disturbances. Fig. 4 shows the laboratory experimental setup. The laboratory experiments were carried out using an artificial canopy with artificial leaves. The spraying unit was moved using a traverser that can move the spraying unit at any speed. All experiments were based on electrostatic spraying, which is a technique typically used to enhance droplet deposition on the underside of the leaves 8,18,19. The materials used in the experiments are presented in Table 3. Spraying was conducted from one side of the canopy. To account for spray penetration through the canopy in actual field conditions, the artificial canopy was sprayed once from one side, then rotated by 180°, and sprayed again.
The design of the artificial canopy and leaves was based on EvaSprayViti, which is a modular test bench used to evaluate the spraying performance of agricultural sprayers and was developed by the French National Institute for Research in Environmental and Agricultural Sciences and Technology and the French Institute for Vineyard and Wine Research 20,21.
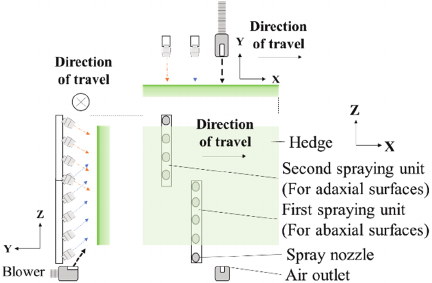
Fig. 6. Schematic diagram of the two-stage spraying system with leaf-turning mechanism concept.
3.3. Field Experiments
The spraying performance of the proposed tractor-mounted two-stage spraying system with leaf-turning mechanism was evaluated in a real environment with external disturbances. Spraying was performed during calm periods with wind speeds below 3.0 m/s. Spraying was first conducted from one side of the hedge, followed by a second application from the opposite side in accordance with common spraying practices (Fig. 5). The performance of the speed sprayer was assessed under conditions normally used in conventional spraying. Thus, the travel speed of the proposed tractor-mounted two-stage spraying system was 3.0 km/h, which was conformed with the travel speed of conventional spraying systems.
4. Two-Stage Spraying with Leaf-Turning Mechanism
4.1. Concept
Figure 6 illustrates the concept of the two-stage spraying system with leaf-turning mechanism. The novel spraying system employed two approaches.
The first approach was an air-assisted leaf-turning mechanism that redirected the abaxial surfaces toward the spray nozzle using the minimum airflow velocity required to initiate leaf turnover, followed by upward spraying. The assisting airflow was specifically designed to facilitate leaf inversion, thereby minimizing the spray drift associated with droplet entrainment in the airstream.
The second approach was two-stage spraying using separate spraying units. The two spraying units were positioned sequentially, where one was used to target abaxial surfaces whereas the other was used to target adaxial surfaces. The first spraying unit for the abaxial surfaces was operated using the leaf-turning mechanism described above, followed by upward spraying. The second spraying unit for the adaxial surfaces was operated via downward spraying. The two-stage spraying ensured the prevention of interactions between the two different spraying processes in order to minimize the influence of airflow on spraying, achieving consistent and uniform coverage on both leaf surfaces, which enhanced the overall efficiency of pesticide application.
In summary, the novel two-stage spraying system with leaf-turning mechanism integrated time-lagged sequential application with optimized air-assisted leaf inversion to achieve comprehensive coverage of both leaf surfaces while minimizing spray drift. By employing separate spraying units for the abaxial and adaxial surfaces and using a precisely controlled minimum airflow velocity for leaf inversion, the spraying system addressed the fundamental limitations of conventional air-assisted spraying systems.
4.2. Determination of the Design Parameters
The following technical requirements must be fulfilled to realize the proposed spraying concept.
-
(1)
Determination of the optimal assisting air velocity for leaf manipulation.
-
(2)
Precise synchronization between the air assistance and first spraying.
-
(3)
Prevention of interactions between the two spraying processes.
4.2.1. Determination of the Assisting Air Velocity
The air velocity \(v\) required to turn a leaf is given by Eq. \(\eqref{eq:1}\), which shows that this parameter is dependent on the force \(F\) required to turn the leaf as well as the air density \(\rho\) and leaf area \(A\).
The force \(F\) and leaf area \(A\) were measured and calculated in a hedge-trained vineyard during the peak growing season. The force \(F\) was measured using a digital force gauge (ZP-5N, IMADA Co., Ltd.). The mean force \(F\) was 0.21 N (sample size \(n=31\), standard error S.E. \(=0.012\) N) and the mean leaf area \(A\) was 0.015 m\(^2\) (\(n=91\), S.E. \(=0.001\) m\(^2\)). The air velocity \(v\) was confirmed to be 4.5 m/s based on Eq. \(\eqref{eq:1}\).
As shown in Fig. 7, the first and second spraying units comprised five and four spray nozzles, respectively. The spray nozzle height, pitch, and vertical angle were determined geometrically to ensure complete coverage of the hedge by the spray droplets. A typical spray nozzle was selected for the pesticide application. Spray volume was expressed as the spray volume applied per unit area of farmland (unit: m\(^3\)/m\(^2\)).
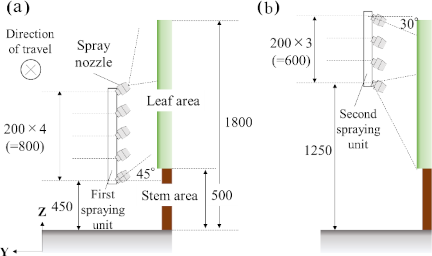
Fig. 7. Layout of the spray nozzles of the (a) first spraying unit and (b) second spraying unit.
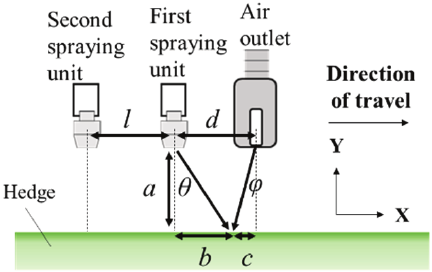
Fig. 8. Schematic diagram of the two-stage spraying with leaf-turning mechanism concept (viewed from top).
4.2.2. Synchronization Between the Air Assistance and First Spraying
To ensure effective deposition, droplet delivery must occur outside the influence zone of the assisting airflow and within the time interval before the leaf returns to its original orientation. The condition under which the droplets remain outside the range of influence of the assisting airflow is expressed by Eq. \(\eqref{eq:2}\), which shows that the distance \(b\) between the point on the hedge surface vertically aligned with the first spraying unit and the point at which the droplet reaches the hedge surface is dependent on the distance \(d\) between the air outlet and first spraying unit, and the width \(c\) of the wind spread on the hedge surface (Fig. 8). The distance \(b\) was determined using Eq. \(\eqref{eq:3}\), which shows that this parameter is dependent on the distance \(a\) between the spray nozzle and hedge surface and the rotational angle around the \(Z\)-axis \(\theta\) between the spraying direction of the first spraying unit and hedge surface (Fig. 8). The width \(c\) of the wind spread on the hedge surface was determined using Eq. \(\eqref{eq:4}\), which indicates that this parameter is dependent on the distance \(a\) and assisting airflow angle \(\varphi\) (Fig. 8). Eq. \(\eqref{eq:5}\) was derived from Eqs. \(\eqref{eq:2}\)–\(\eqref{eq:4}\), indicating that the extent to which the droplets are affected by the assisting airflow is determined by the angle \(\theta\). The right-hand side of Eq. \(\eqref{eq:5}\) represents the upper limit of the tangent of the angle \(\theta\), beyond which droplets would be affected by the assisting airflow.
The distance \(d\) was set at 220 mm, which was the minimum spray nozzle separation required to prevent interference between the assisting airflow and pesticide spray. Owing to the width constraint and considering the width of the tractor and the distance between adjacent hedges, the distance \(a\) was set at 220 mm. The angle \(\varphi\) was 13° based on the standard jet angle 22,23. Therefore, the angle \(\theta\) must be within the range \(\theta<37°\) based on Eq. \(\eqref{eq:5}\) to avoid the influence of the assisting airflow. The spray performance was evaluated experimentally at two angles to validate the effectiveness of the proposed two-stage spraying system with leaf-turning mechanism. The angles \(\theta\) were selected to be 45° and 30° to represent the interior and exterior of the geometrically determined influence zone of the assisting airflow, respectively.
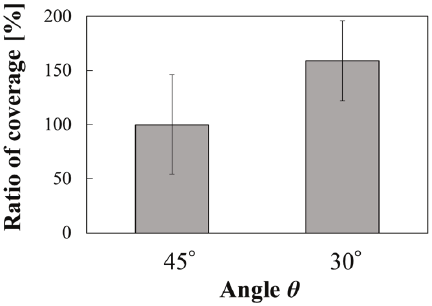
Fig. 9. Ratio of coverage on the abaxial surfaces due to differences in the horizontal angle \(\theta\) of the first spraying unit, where the spray volume was \(0.9\times 10^{-4}\) m\(^3\)/m\(^2\) and spray pressure was 0.5 MPa. Note that \(n =18\) and the error bars indicate the S.E.
Figure 9 shows the ratio of coverage, using the coverage on the abaxial surfaces at an angle \(\theta\) of 45° for the first spraying unit as the reference value. The ratio of coverage on the abaxial surfaces increased by 59% when performed at \(\theta=30°\) compared with that at \(\theta=45°\). These findings indicated that adjusting the spray nozzle angle to 30° significantly enhanced the droplet deposition efficiency on the abaxial surfaces of the leaves. The superior performance at 30° suggests that the spray droplets likely enter the effective zone of the assisting airflow at spray nozzle angle of 45°. This may have caused interference between the airflow and pesticide droplets, resulting in a reduced deposition efficiency on the abaxial surfaces.
4.2.3. Prevention of Interactions Between the Two Spraying Processes
The first and second spraying units were designed to target the abaxial and adaxial surfaces of the leaves, respectively. If the downward spraying from the second spraying unit reaches the leaf while it is still in the process of turning over, the spray pressure may cause the leaf to prematurely revert to its original orientation. Therefore, adequate spatial separation between the first and second spraying units is required to ensure that each application occurs independently without aerodynamic or droplet interference, thereby maintaining the integrity of the two-stage spraying process. The distance \(l\) between the two spraying units determines the offset between the first and second spraying (Fig. 8). Based on the design constraints, the distance \(l\) was set between 400 mm (minimum value to prevent interference between the spraying units) and 730 mm (maximum value determined by the allowable overall length of the pesticide sprayer). The rotational angle around the \(Z\)-axis between the spraying direction of the second spraying unit and the hedge surface was set at 30°, considering the vehicle speed, as a rotational angle of 0° would increase the risk of rearward drift.
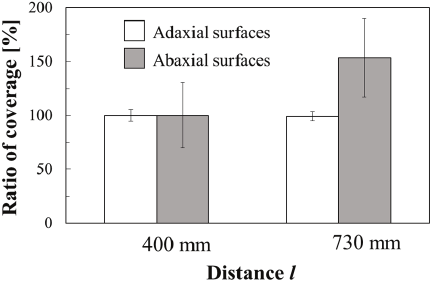
Fig. 10. Ratio of coverage on the adaxial and abaxial surfaces due to differences in distance \(l\) between the spraying units, where the spray volume was \(0.9\times 10^{-4}\) m\(^3\)/m\(^2\) and spray pressure was 0.5 MPa. Note that \(n =18\) for the adaxial surfaces, \(n =18\) for the abaxial surfaces, and the error bars represent the S.E.
Figure 10 shows the ratio of coverage using the coverage on the adaxial and abaxial surfaces at a distance \(l=400\) mm as the reference value. The equivalent ratios of coverage on the adaxial surfaces were obtained at \(l=400\) and 730 mm, whereas the ratio of coverage on the abaxial surfaces increased by 53% at \(l=730\) mm. The experimental results demonstrated that when two sprayings were conducted in close temporal proximity, the efficacy of the first application on the abaxial leaf surfaces was significantly diminished by the subsequent spraying. This interference likely disrupted the airflow-induced leaf orientation or displaced previously sprayed droplets, thereby reducing the overall spraying efficiency.
5. Results and Discussion
The performance of the proposed tractor-mounted two-stage spraying system with leaf-turning mechanism was assessed in a vineyard and compared with that of a conventional air-assisted spraying system. Fig. 11 shows the spray volume and coverage of each spraying system in the vineyard. Although the novel spraying system used only 60% of the spray volume of the conventional air-assisted spraying system, it achieved equivalent coverage on adaxial surfaces and a 6% improvement in coverage on abaxial surfaces.
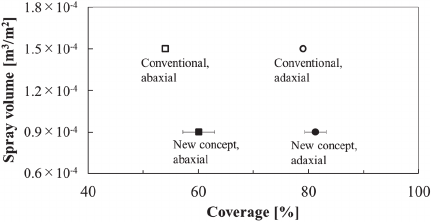
Fig. 11. Coverage on the adaxial (circle) and abaxial (square) surfaces due to differences in conventional (unfilled) and new (filled) spraying concepts, where the spray pressures were 0.5 MPa (new concept) and 1.5 MPa (conventional concept). Note that \(n =12\) (conventional concept) and \(n =72\) (new concept). The error bars represent the S.E.
The spraying performance exhibited a degree of variability with respect to height for both the adaxial and abaxial surfaces of the leaves. For the adaxial surfaces, the adhesion performance was measured to be 83%, 77%, and 84% in the upper, middle, and lower sections, respectively, achieving an extremely low standard deviation \(\delta\) (\(\delta=3\)). In contrast, the abaxial surfaces showed greater variability, where the adhesion performance was found to be 56%, 73%, and 54% in the upper, middle, and lower sections, respectively, yielding \(\delta=9\). Nevertheless, the adhesion performance across all height positions on the abaxial surfaces was observed to be equal to or superior to that of the conventional air-assisted spraying system.
The superior performance of the novel two-stage spraying system with leaf-turning mechanism at a spray volume of 60% is attributed to the following key factors.
-
(1)
Separating adaxial and abaxial sprayings with sequential spray nozzles eliminates mutual interference and focuses the droplets precisely on each surface.
-
(2)
The air-assisted leaf-turning mechanism employs only the minimum wind speed (4.5 m/s) to invert the leaves, avoiding excessive turbulence, and preventing droplet loss.
-
(3)
The proposed system operates at a low spray pressure of 0.5 MPa, which is one-half to one-third of the spray pressure of conventional air-assisted spraying systems, producing droplets that directly impact the target surfaces.
The findings of this study indirectly demonstrated the potential for spray drift reduction through technical improvements that addressed the following drift-promoting factors:
6. Conclusion
Pesticide spraying is essential for maintaining crop quality; however, it comes with its own set of challenges such as spray drift and rising costs. Spray drift increases with the spray volume, which leads to a higher potential for off-target pesticide deposition, which is undesirable ecologically and economically. Even though conventional air-assisted spraying systems improve coverage on abaxial surfaces, these systems rely on high pressure and airflow, causing spray drift and uneven pesticide deposition. In this study, we proposed a tractor-mounted two-stage spraying system with leaf-turning mechanism for hedge-trained crops. The novel spraying system featured (1) separate targeting of adaxial and abaxial surfaces to reduce airflow interference and (2) a leaf-turning mechanism to minimize the dependence on pressure and airflow.
Achievements and insights gained
-
The novel spraying system achieved equivalent coverage on adaxial surfaces while using only 60% of the spray volume compared with that of a conventional air-assisted spraying system. In addition, the proposed spraying system improved coverage on abaxial surfaces by 6% compared with that of the conventional spraying system.
-
The two-stage spraying system with leaf-turning mechanism highlighted the importance of optimal wind speed for leaf manipulation and synchronization of spray application timing.
These findings suggest that the proposed spraying system can reduce spray drift while maintaining or improving the spraying performance, which is primarily due to the reduced spray volume, minimized air–pesticide-droplet interactions, lower operating pressure, and limited air assistance range. The findings of this study also contribute to the advancement of autonomous pesticide application systems by addressing the critical issues of pesticide spray volume and spray drift.
- [1] Ministry of Agriculture, Forestry and Fisheries, “Pesticide drift control technology manual,” 2010 (in Japanese).
- [2] F. P. Terra, G. H. do Nascimento, G. A. Duarte, and P. L. J. Drews-Jr., “Autonomous agricultural sprayer using machine vision and nozzle control,” J. of Intelligent & Robotic Systems, Vol.105, pp. 123-134, 2022.
- [3] Bank of Japan, “Pesticide Price Index,” 2023 (in Japanese).
- [4] G. Pergher and R. Gubiani, “The effect of spray application rate and airflow rate on foliar deposition in a hedgerow vineyard,” J. of Agricultural Engineering Research, Vol.61, No.3, pp. 205-216, 1995. https://doi.org/10.1006/jaer.1995.1048
- [5] A. Duga, K. Ruysen, D. Dekeyser, D. Nuyttens, D. Bylemans, B. Nicolai, and P. Verboven, “Spray deposition profiles in pome fruit trees: Effects of sprayer design, training system and tree canopy characteristics,” Crop Protection, Vol.67, pp. 200-213, 2015. https://doi.org/10.1016/j.cropro.2014.10.016
- [6] F. Brewer, “Low-volume air-blast spraying in British Columbia,” Canada Department of Agriculture Publication, 1963.
- [7] P. Miller and M. Ellis, “Effects of formulation on spray nozzle performance for applications from ground-based boom sprayers,” Crop Protection, Vol.19, Nos.8-10, pp. 609-615, 2000. https://doi.org/10.1016/S0261-2194(00)00080-6
- [8] Y. Zhang, L. Wang, and H. Liu, “Study on utility improvement of air-assisted electrostatic sprayer,” J. of Agricultural Engineering, Vol.45, pp. 123-130, 2021 (in Japanese).
- [9] M. Tanaka, S. Yamada, and T. Suzuki, “Effect of airflow angle on abaxial surface deposition in air-assisted spraying,” Agricultural Sciences, Vol.12, pp. 45-52, 2020.
- [10] R. Smith, J. Doe, and A. Johnson, “Understanding effective citrus spray application through computer simulations,” J. of Horticultural Science, Vol.78, pp. 67-75, 2022.
- [11] Q. Ye, B. Shen, O. Tiedje, T. Bauernhansl, and J. Domnick, “Numerical and experimental study of spray coating using air-assisted high-pressure atomizers,” J. of Coatings Technology and Research, Vol.17, pp. 935-944, 2020.
- [12] P. C. H. Miller et al., “Developing strategies to reduce spray drift in pneumatic spraying in orchards,” Science of The Total Environment, Vol.736, Article No.139238, 2020.
- [13] K. Brown, L. Green, and P. White, “Spray drift from three airblast sprayer technologies in a modern orchard work environment,” J. of Pesticide Science, Vol.39, pp. 89-97, 2023.
- [14] T. Miller, J. Davis, and R. Thompson, “Effects of sprayer speed, spray distance, and nozzle arrangement angle on low-flow air-assisted spray deposition,” Precision Agriculture, Vol.15, pp. 201-210, 2021.
- [15] A. Wilson, B. Taylor, and C. Harris, “Canopy spray application technology in specialty crops: A slowly evolving landscape,” Crop Science, Vol.62, pp. 345-356, 2022.
- [16] A. Richardson, D. Richardson, T. van den Heuvel, P. Franz, and R. Butler, “Meeting droplet size specifications for aerial herbicide application to control invasive wilding conifers in New Zealand,” New Zealand Plant Protection, Vol.73, pp. 13-23, 2020. https://doi.org/10.30843/nzpp.2020.73.11712
- [17] Y. Kubota, “Development of image processing software for simple and high-precision measurement of coverage rate of chemical droplet stains on water-sensitive paper,” J. of Agricultural Information Research, Vol.19, No.2, pp. 16-22, 2010 (in Japanese). https://doi.org/10.3173/air.19.16
- [18] D. Maski and D. Durairaj, “Effects of charging voltage, application speed, target height, and orientation upon charged spray deposition on leaf abaxial and adaxial surfaces,” Crop Protection, Vol.29, pp. 134-141, 2010. https://doi.org/10.1016/j.cropro.2009.10.006
- [19] M. Tanaka, S. Yamada, and T. Suzuki, “The role of electrostatic forces in pesticide application efficiency,” Agricultural Sciences, Vol.12, pp. 67-75, 2022.
- [20] J. Douzals, “EvaSprayViti: A new tool for sprayer’s agro-environmental performance assessment,” 12th Workshop on Spray Application Techniques in Fruit Growing, 2013.
- [21] S. Verges, B. Ruelle, O. Hébrard, J. Magnier, P. Montegano, and X. Ribeyrolles, “EvaSprayViti: Une vigne artificielle pour l’optimisation agro-environnementale de la pulvérisation en viticulture,” Innovations Agronomiques, 2015 (in French).
- [22] S. Pope, “Turbulent Jets,” Cambridge University Press, 2000.
- [a] N. Rajaratnam, “Turbulent Jets,” Elsevier, 1976.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.