Paper:
100-Mouse System: Scalable Multi-Robot Testbed with State Management User Interface
Shota Yamamoto*1,*2, Ryusei Matsumoto*1,*3, Yoko Sasaki*1
 , and Keisuke Okumura*1,*4
, and Keisuke Okumura*1,*4
*1National Institute of Advanced Industrial Science and Technology
2-3-26 Aomi, Koto-ku, Tokyo 135-0064, Japan
*2Waseda University
3-4-1 Okubo, Shinjuku-ku, Tokyo 169-8555, Japan
*3Institute of Science Tokyo
2-12-1 Ookayama, Meguro-ku, Tokyo 152-8550, Japan
*4University of Cambridge
William Gates Building, 15 JJ Thompson Avenue, Cambridge, United Kingdom

Multi-robot systems are expected to underpin the future of automated infrastructure in various fields, including logistics and transportation. Despite the importance of multi-robot research, operating a large number of physical robots presents nontrivial challenges that exceed those encountered in simulation environments. These include communication saturation, the difficulties in real-time localization, detection of abnormal robot behavior, and the need for user-friendly interfaces to allow for effective state management. Collectively, they create a significant gap in the assumptions between lab-scale studies and deployable technologies in this field. Therefore, we developed a versatile testbed for multi-robot studies that can accommodate up to 100 differential-drive robots, called the 100-Mouse System. Our hallmark is scalability, while maintaining flexibility to allow researchers to test their ideas with actual robot fleets. This is a result of deliberately and integrally designed modules from both software and hardware perspectives, as well as a user interface, which is essential in large-scale experiments. As an application of this platform, we present a pattern formation task in a centralized manner, demonstrating the ability of the system to effectively accommodate large robot fleets.
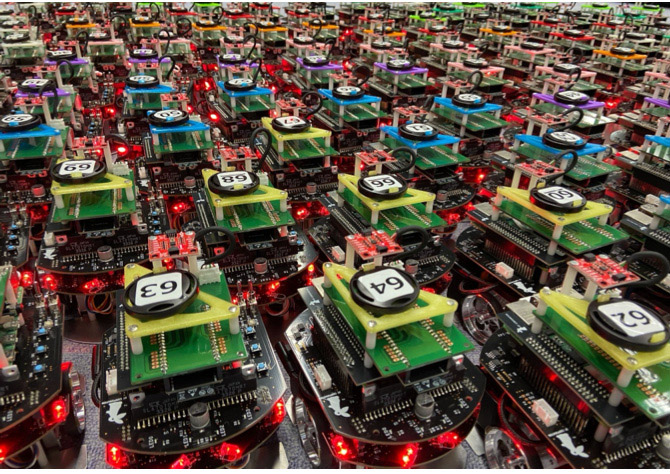
Fleet of 100 differential-drive robots for large-scale experiments
- [1] K. Zhang et al., “Multi-Agent Reinforcement Learning: A Selective Overview of Theories and Algorithms,” K. G. Vamvoudakis, Y. Wan, F. L. Lewis, and D. Cansever (Eds.), “Handbook of Reinforcement Learning and Control,” pp. 321-384, Cham: Springer, 2021. https://doi.org/10.1007/978-3-030-60990-0_12
- [2] D. Helbing, “Agent-Based Modeling,” D. Helbing (Ed.), “Social Self-Organization: Agent-Based Simulations and Experiments to Study Emergent Social Behavior,” pp. 25-70, Springer, 2012. https://doi.org/10.1007/978-3-642-24004-1_2
- [3] F. Arvin et al., “Development of an autonomous micro robot for swarm robotics,” Proc. IEEE Int. Conf. Mechatronics Autom., pp. 635-640, 2014. https://doi.org/10.1109/ICMA.2014.6885771
- [4] J. Blumenkamp et al., “The Cambridge RoboMaster: An Agile Multi-Robot Research Platform,” arXiv preprint, arXiv:2405.02198, 2024. https://doi.org/10.48550/arXiv.2405.02198
- [5] D. Pickem et al., “The Robotarium: A remotely accessible swarm robotics research testbed,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1699-1706, 2017. https://doi.org/10.1109/ICRA.2017.7989200
- [6] N. Michael et al., “Architecture, Abstractions, and Algorithms for Controlling Large Teams of Robots: Experimental Testbed and Results,” M. Kaneko and Y. Nakamura (Eds.), “Robotics Research,” Springer Tracts in Advanced Robotics, Vol.66, pp. 409-419, Springer, 2011. https://doi.org/10.1007/978-3-642-14743-2_34
- [7] A. Özgür et al., “Cellulo: Versatile Handheld Robots for Education,” Proc. of ACM/IEEE Int. Conf. on Human-Robot Interaction, pp. 119-127, 2017. https://doi.org/10.1145/2909824.3020247
- [8] J. McLurkin et al., “A robot system design for low-cost multi-robot manipulation,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 912-918, 2014. https://doi.org/10.1109/IROS.2014.6942668
- [9] S. Wilson et al., “Pheeno, A Versatile Swarm Robotic Research and Education Platform,” IEEE Robotics and Automation Letters, Vol.1, Issue 2, pp. 884-891, 2016. https://doi.org/10.1109/LRA.2016.2524987
- [10] M. Bonani et al., “The marXbot, a miniature mobile robot opening new perspectives for the collective-robotic research,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4187-4193, 2010. https://doi.org/10.1109/IROS.2010.5649153
- [11] J. Betthauser et al., “Wolfbot: A distributed mobile sensing platform for research and education,” Proc. of the 2014 Zone 1 Conf. of the American Society for Engineering Education, 2014. https://doi.org/10.1109/ASEEZone1.2014.6820632
- [12] J. M. Soares et al., “The Khepera IV Mobile Robot: Performance Evaluation, Sensory Data and Software Toolbox,” L. Reis et al. (Eds.), “Robot 2015: Second Iberian Robotics Conf.,” Advances in Intelligent Systems and Computing, Vol.417, pp. 767-781, 2016. https://doi.org/10.1007/978-3-319-27146-0_59
- [13] G. Caprari and R. Siegwart, “Design and Control of the Mobile Micro Robot Alice,” Proc. 2nd Int. Symp. on Autonomous Minirobots for Research and Edutainment, pp. 23-32, 2003. https://doi.org/10.3929/ethz-a-010090678
- [14] L. Paull et al., “Duckietown: An open, inexpensive and flexible platform for autonomy education and research,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 1497-1504, 2017. https://doi.org/10.1109/ICRA.2017.7989179
- [15] S. Kernbach et al., “Re-embodiment of Honeybee Aggregation Behavior in an Artificial Micro-Robotic System,” Adaptive Behavior, Vol.17, Issue 3, pp. 237-259, 2009. https://doi.org/10.1177/1059712309104966
- [16] M. Rubenstein et al., “Kilobot: A low cost scalable robot system for collective behaviors,” Proc. IEEE Int. Conf. Robot. Autom., pp. 3293-3298, 2012. https://doi.org/10.1109/ICRA.2012.6224638
- [17] H. Wang and M. Rubenstein, “Shape Formation in Homogeneous Swarms Using Local Task Swapping,” IEEE Trans. on Robotics, Vol.36, Issue 3, pp. 597-612, 2020. https://doi.org/10.1109/TRO.2020.2967656
- [18] P. R. Wurman et al., “Coordinating Hundreds of Cooperative, Autonomous Vehicles in Warehouses,” AI Magazine, Vol.29, No.1, Article No.9, 2008. https://doi.org/10.1609/aimag.v29i1.2082
- [19] K. Azadeh et al., “Robotized and Automated Warehouse Systems: Review and Recent Developments,” Transportation Science, Vol.53, No.4, pp. 917-945, 2019. https://doi.org/10.2139/ssrn.2977779
- [20] Y. Shen et al., “Multi-Agent Reinforcement Learning for Resource Allocation in Large-Scale Robotic Warehouse Sortation Centers,” 2023 62nd IEEE Conf. on Decision and Control (CDC), 2023. https://doi.org/10.1109/CDC49753.2023.10383904
- [21] R. Stern et al., “Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks,” Proc. of the Int. Symp. on Combinatorial Search, Vol.10, No.1, pp. 151-158, 2019. https://doi.org/10.1609/socs.v10i1.18510
- [22] J.-M. Alkazzi and K. Okumura, “A Comprehensive Review on Leveraging Machine Learning for Multi-Agent Path Finding,” IEEE Access, Vol.12, pp. 57390-57409, 2024. https://doi.org/10.1109/ACCESS.2024.3392305
- [23] P. E. Hart et al., “A Formal Basis for the Heuristic Determination of Minimum Cost Paths,” IEEE Trans. on Systems Science and Cybernetics, Vol.4, Issue 2, pp. 100-107, 1968. https://doi.org/10.1109/tssc.1968.300136
- [24] S. LaValle, “Rapidly-Exploring Random Trees: A New Tool for Path Planning,” Research Report 9811, Department of Computer Science, Iowa State University, 1998.
- [25] S. Karaman and E. Frazzoli, “Incremental Sampling-Based Algorithms for Optimal Motion Planning,” Y. Matsuoka et al. (Eds.), “Robotics Science and Systems VI,” pp. 267-274, MIT Press, 2011. https://doi.org/10.7551/mitpress/9123.003.0038
- [26] K. Okumura and X. Défago, “Solving simultaneous target assignment and path planning efficiently with time-independent execution,” Artificial Intelligence, Vol.321, Article No.103946, 2023. https://doi.org/10.1016/j.artint.2023.103946
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.