Paper:
Development of Fins for Underwater Robots with 3D Printer and Experimental Evaluation
Bagus Yunanto*,**
 and Naoyuki Takesue*
and Naoyuki Takesue*
*Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan
**Politeknik Negeri Semarang
Jl. Prof. Sudarto, Tembalang, Semarang, Central Java 50275, Indonesia

This paper explores the innovative application of 3D printing technology in developing fins for underwater robots. The study delves into the design, fabrication, and optimization processes involved in creating fins using 3D printed technology, with the objective of improving the agility, performance, and overall capabilities of underwater robotics. The analyses and experimental results present the empirical findings of testing these 3D-printed fins.
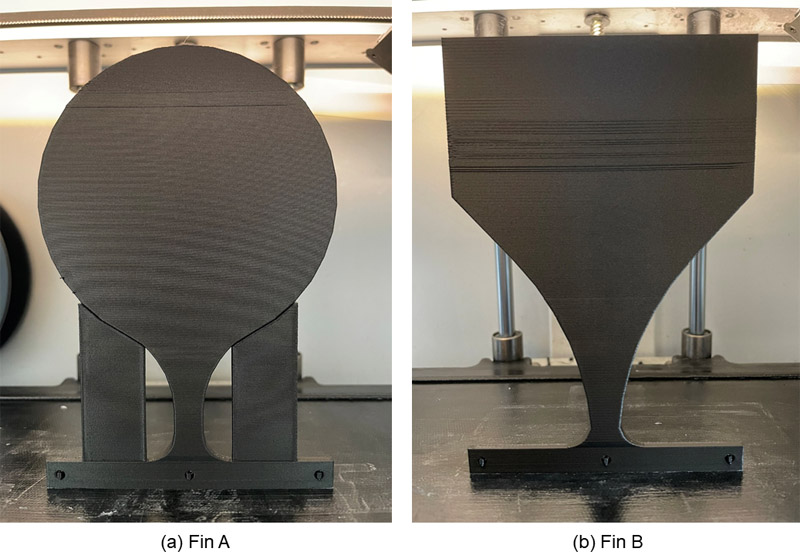
Longitudinal vertical 3D-printed fins
- [1] L. Cen and A. Erturk, “Bio-inspired aquatic robotics by untethered piezohydroelastic actuation,” Bioinspiration & Biomimetics, Vol.8, No.1, Article No.016006, 2013. https://doi.org/10.1088/1748-3182/8/1/016006
- [2] Q. Zuo, Y. Xu, F. Xie, H. Fang, K. He, Y. Zhong, and Z. Li, “Dynamic Modeling of a Novel Kind of Rigid-Soft Coupling Biomimetic Robotic Fish,” J. of Intelligent & Robotic Systems, Vol.105, No.2, Article No.41, 2022. https://doi.org/10.1007/s10846-022-01661-w
- [3] P. Duraisamy, M. N. Santhanakrishnan, and R. Amirtharajan, “Genetic Algorithm Optimized Grey-Box Modelling and Fuzzy Logic Controller for Tail-Actuated Robotic Fish,” Neural Processing Letters, Vol.55, No.8, pp. 11577-11594, 2023. https://doi.org/10.1007/s11063-023-11391-1
- [4] D. Chen, B. Wang, Y. Xiong, J. Zhang, R. Tong, Y. Meng, and J. Yu, “Design and Analysis of a Novel Bionic Tensegrity Robotic Fish with a Continuum Body,” Biomimetics, Vol.9, No.1, Article No.19, 2024. https://doi.org/10.3390/biomimetics9010019
- [5] I. Yamamoto, Y. Terada, T. Nagamatu, and Y. Imaizumi, “Propulsion System with Flexible/Rigid Oscillating Fin,” IEEE J. of Oceanic Engineering, Vol.20, No.1, pp. 23-30, 1995. https://doi.org/10.1109/48.380249
- [6] B. Yunanto and N. Takesue, “Experimental Development of Fins for Underwater Robots,” J. Robot. Mechatron., Vol.35, No.6, pp. 1638-1644, 2023. https://doi.org/10.20965/jrm.2023.p1638
- [7] X. Wu, Y. Wang, J. Xu, and H. Yu, “Numerical simulation of drag reduction effect on the surface of bionic fish-scales,” J. of Physics: Conf. Series, Vol.2492, No.1, Article No.012012, 2023. https://doi.org/10.1088/1742-6596/2492/1/012012
- [8] D. Li, H. Deng, Y. E. Bayiz, and B. Cheng, “Effects of Design and Hydrodynamic Parameters on Optimized Swimming for Simulated, Fish-inspired Robots,” 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.2022-October, pp. 7500-7506, 2022. https://doi.org/10.1109/IROS47612.2022.9981478
- [9] R. Hall, E. Skorina, S.-S. Chiang, and C. D. Onal, “The Effect of Design and Control Parameters of a Soft Robotic Fish Tail to Maximize Propulsion Force in Undulatory Actuation,” 2022 9th IEEE RAS/EMBS Int. Conf. for Biomedical Robotics and Biomechatronics (BioRob), 2022.
- [10] M. Garcia, C. Rouse, B. Estrada, C. Tekes, A. A. A. Moghadam, and A. Tekes, “Towards Development of 3D Printed Swimming Robot Using Soft Electromagnetic Actuation,” Volume 7A: Dynamics, Vibration, and Control, 2021. https://doi.org/10.1115/IMECE2021-70151
- [11] M. Takagi, H. Mori, A. Yimit, Y. Hagihara, and T. Miyoshi, “Development of a Small Size Underwater Robot for Observing Fisheries Resources – Underwater Robot for Assisting Abalone Fishing–,” J. Robot. Mechatron., Vol.28, No.3, pp. 397-403, 2016. https://doi.org/10.20965/jrm.2016.p0397
- [12] X. Wu, J. Huang, Y. Wang, and L. Wang, “Pose estimation-based experimental system for analyzing fish swimming,” bioRxiv, 2023. https://doi.org/10.1101/2022.09.07.507033
- [13] T. G. A. Vercruyssen, S. Henrion, U. K. Müller, J. L. van Leeuwen, and F. C. T. van der Helm, “Cost of Transport of Undulating Fin Propulsion,” Biomimetics, Vol.8, No.2, Article No.214, 2023. https://doi.org/10.3390/biomimetics8020214
- [14] M. Vasileiou, N. Manos, and E. Kavallieratou, “A low-cost 3D printed mini underwater vehicle: Design and Fabrication,” 2021 20th Int. Conf. on Advanced Robotics (ICAR), pp. 390-395, 2021. https://doi.org/10.1109/ICAR53236.2021.9659412
- [15] J. Z. Gul, K. Y. Su, and K. H. Choi, “Fully 3D Printed Multi-Material Soft Bio-Inspired Whisker Sensor for Underwater-Induced Vortex Detection,” Soft Robotics, Vol.5, No.2, pp. 122-132, 2018. https://doi.org/10.1089/soro.2016.0069
- [16] R. Zhang and S. Zhou, “Numerical investigation on hydrodynamic performance of a ducted propeller for vectored underwater robot,” J. Robot. Mechatron., Vol.32, No.6, pp. 1259-1267, 2020. https://doi.org/10.20965/jrm.2020.p1259
- [17] D. Quinn and G. Lauder, “Tunable stiffness in fish robotics: mechanisms and advantages,” Bioinspiration & Biomimetics, Vol.17, No.1, Article No.011002, 2022. https://doi.org/10.1088/1748-3190/ac3ca5
- [18] I. Ahmad, A. Ghafail, A. M. Abdelrhman, S. Chithambaram, S. A. Imam, and M. Hammad, “Design and Development of 3D Printed based Magnetic Coupling System for Autonomous Underwater Vehicle,” 2023 5th Int. Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), 2023.
- [19] G. Schillaci, F. Schillaci, and V. V. Hafner, “A Customisable Underwater Robot,” arXiv preprint, arXiv:1707.06564, 2017. https://doi.org/10.48550/arXiv.1707.06564
- [20] X. Wu, Y. Wang, J. Xu, and H. Yu, “Study on surface fabrication and drag reduction performance of the bionic fish-scale composite structure,” J. of Physics: Conf. Series, Vol.2499, No.1, Article No.012005, 2023. https://doi.org/10.1088/1742-6596/2499/1/012005
- [21] N. Pai, A. Contreras Esquen, C. Tekes, A. A. Amiri Moghadam, and A. Tekes, “Design and Development of a Fish-Like, Soft Biomimetic Robot,” Volume 5: Dynamics, Vibration, and Control, 2022. https://doi.org/10.1115/IMECE2022-94635
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.