Paper:
Shape Estimation of Snake Robot Using Extended Kalman Filter and Automatic Propulsion in Piping by Helicoidal Rolling Motion Considering Helix Pitch
Yuki Tada and Tetsushi Kamegawa
Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama, Okayama 700-8530, Japan

This study describes a method for applying an extended Kalman filter to a snake robot, which moves through a pipe using a helicoidal rolling motion. The filter estimates the helix radius, amount of twisting, and helix pitch to adapt to changes in the diameter inside the pipe. Additionally, offset values are added to these estimated values to propel the snake robot along the pipe autonomously. In particular, we experimentally demonstrated the effect of helix pitch on friction force and proposed a parameter-setting strategy that accounts for the range of motion of the joints. Finally, we validated the results of the proposed method through experiments on an actual robot.
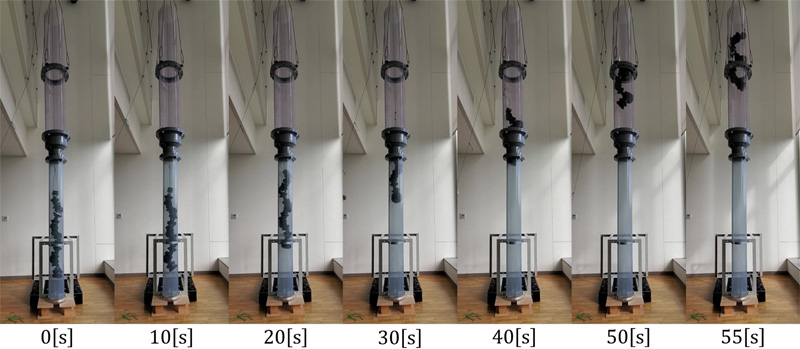
Propulsion in piping by helicoidal rolling motion
- [1] S. Tadokoro (Ed.), “Disaster Robotics: Results from the ImPACT Tough Robotics Challenge,” Springer, 2019.
- [2] T. Kamegawa et al., “Development of a separable search-and-rescue robot composed of a mobile robot and a snake robot,” Advanced Robotics, Vol.34, No.2, pp. 132-139, 2020. https://doi.org/10.1080/01691864.2019.1691941
- [3] S. Hirose, “Biologically Inspired Robots (Snake-like Locomotor and Manipulator),” Oxford University Press, 1987.
- [4] P. Liljebäck, K. Y. Pettersen, Ø. Stavdahl, and J. T. Gravdahl, “Snake robots: Modelling, mechatronics, and control,” Springer Science & Business Media, 2012.
- [5] H. Ohno and S. Hirose, “Design of Slim Slime Robot and its Gait of Locomotion,” Proc. of the 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 707-715, 2001. https://doi.org/10.1109/IROS.2001.976252
- [6] H. Yamada and S. Hirose, “Steering of pedal wave of a snake-like robot by superposition of curvatures,” 2010 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 419-424, 2010. https://doi.org/10.1109/IROS.2010.5652118
- [7] T. Takemori, M. Tanaka, and F. Matsuno, “Gait Design and Experiment for a Snake Robot Designed by Connecting Curve Segments,” IEEE Trans. on Robotics, Vol.34, No.5, pp. 1384-1391, 2018. https://doi.org/10.1109/TRO.2018.2830346
- [8] T. Kamegawa, T. Harada, and A. Gofuku, “Realization of cylinder climbing locomotion with helical form by a snake robot with passive wheels,” 2009 IEEE Int. Conf. on Robotics and Automation, pp. 3067-3072, 2009. https://doi.org/10.1109/ROBOT.2009.5152862
- [9] Y. Wang, T. Kamegawa, E. Matsuda, and A. Gofuku, “Motion planning of a snake robot moves in crowded pipes,” Advanced Robotics, Vol.36, No.16, pp. 781-793, 2022. https://doi.org/10.1080/01691864.2022.2095225
- [10] T. Baba, Y. Kameyama, T. Kamegawa, and A. Gofuku, “A snake robot propelling inside of a pipe with helical rolling motion,” Proc. of SICE Annual Conf. 2010, pp. 2319-2325, 2010.
- [11] T. Kamegawa, T. Baba, and A. Gofuku, “V-shift control for snake robot moving the inside of a pipe with helical rolling motion,” 2011 IEEE Int. Symp. on Safety, Security, and Rescue Robotics, 2011. https://doi.org/10.1109/SSRR.2011.6106789
- [12] W. Qi, T. Kamegawa, and A. Gofuku, “Implementation of helical wave propagation motion in snake robot moving on exterior of a pipe,” Int. J. of Advanced Mechatronic Systems, Vol.7, No.6, pp. 359-367, 2019. https://doi.org/10.1504/IJAMECHS.2017.099314
- [13] M. Inazawa, T. Takemori, M. Tanaka, and F. Matsuno, “Motion Design for a Snake Robot Negotiating Complicated Pipe Structures of a Constant Diameter,” 2020 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 8073-8079, 2020. https://doi.org/10.1109/ICRA40945.2020.9197224
- [14] T. Takemori, M. Tanaka, and F. Matsuno, “Adaptive helical rolling of a snake robot to a straight pipe with irregular cross-sectional shape,” IEEE Trans. on Robotics, Vol.39, No.1, pp. 437-451, 2022. https://doi.org/10.1109/TRO.2022.3189224
- [15] D. Rollinson and H. Choset, “Pipe network locomotion with a snake robot,” J. of Field Robotics, Vol.33, No.3, pp. 322-336, 2016. https://doi.org/10.1002/rob.21549
- [16] D. Rollinson and H. Choset, “Gait-Based Compliant Control for Snake Robots,” 2013 IEEE Int. Conf. on Robotics and Automation, pp. 5123-5128, 2013. https://doi.org/10.1109/ICRA.2013.6631311
- [17] F. Enner, D. Rollinson, and H. Choset, “Motion estimation of snake robots in straight pipes,” 2013 IEEE Int. Conf. on Robotics and Automation, pp. 5168-5173, 2013. https://doi.org/10.1109/ICRA.2013.6631316
- [18] W. Xiao, Y. Gao, W. Wei, J. Zhang, and X. Tan, “Adaptive climbing motion of snake robot based on joint decoupling and extended Kalman filter,” J. of Physics: Conference Series, Vol.1754, Article No.012152, 2021. https://doi.org/10.1088/1742-6596/1754/1/012152
- [19] M. Mori, H. Yamada, and S. Hirose, “Design and Development of Active Cord Mechanism ACM-R3 and its 3-dimensional Locomotion Control,” J. of the Robotics Society of Japan, Vol.23, No.7, pp. 886-897, 2005. https://doi.org/10.7210/jrsj.23.886
- [20] H. Yamada and S. Hirose, “Study on the 3D Shape of Active Cord Mechanism,” Proc. of the 2006 IEEE Int. Conf. on Robotics and Automation, pp. 2890-2895, 2006. https://doi.org/10.1109/ROBOT.2006.1642140
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.