Paper:
Performance Evaluation and Wing Deformation Analysis of Flapping-Wing Aerial Vehicles with Varying Flapping Parameters and Patterns
Muhammad Labiyb Afakh
 , Hidaka Sato
, and Naoyuki Takesue
, Hidaka Sato
, and Naoyuki Takesue
Department of Mechanical Systems Engineering, Graduate School of Systems Design, Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan

There has been significant interest in the field of bio-inspired robotics, particularly in the development of flapping-wing robots from micro to bird size. Most flapping robots use lever-crank mechanisms or servomotors as wing flapping mechanisms. Servomotor-based flapping has the advantage of being able to generate various flapping patterns according to amplitude, offset, frequency, waveform, and other factors. However, it is not clear how these factors affect thrust generation. Therefore, this study focuses on the force generation and power consumption in different flapping patterns as well as the wing deformation during the flapping motion to provide some insights into the performance improvement. The results showed that the response characteristics of the actuators caused the thrust to saturate at high frequencies, and that sinusoidal pattern could generally achieve good performance and efficiency.
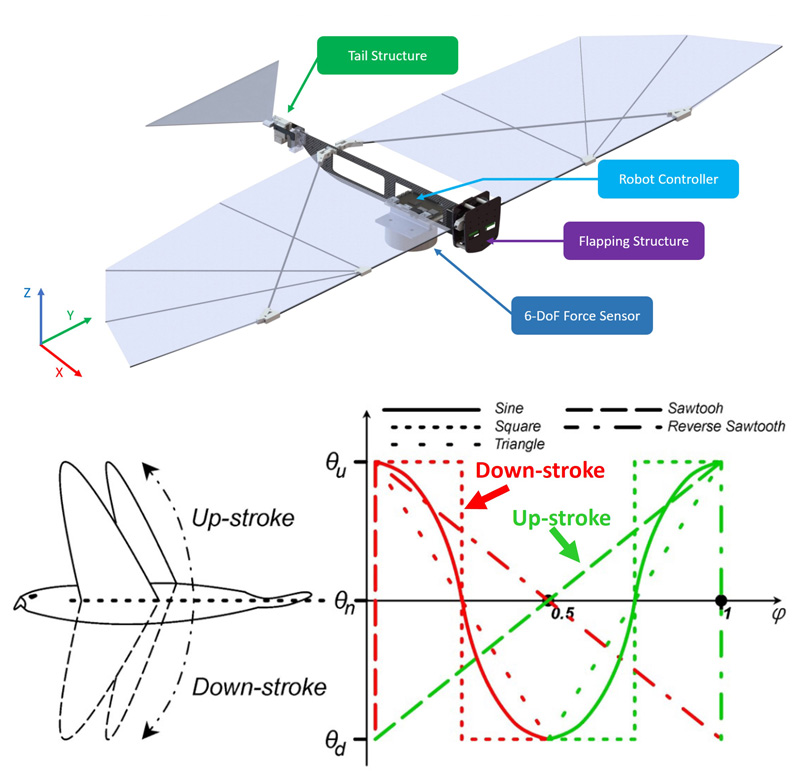
FWAV design & evaluated flapping patterns
- [1] J.-H. Han, Y.-J. Han, H.-H. Yang, S.-G. Lee, and E.-H. Lee, “A review of flapping mechanisms for avian-inspired flapping-wing air vehicles,” Aerospace, Vol.10, Article No.554, 2023. https://doi.org/10.3390/aerospace10060554
- [2] E. Ajanic, M. Feroskhan, S. Mintchev, F. Noca, and D. Floreano, “Bioinspired wing and tail morphing extends drone flight capabilities,” Science Robotics, Vol.5, Article No.eabc2897, 2020. https://doi.org/10.1126/scirobotics.abc2897
- [3] G. de Croon, “Flapping wing drones show off their skills,” Science Robotics, Vol.5, Article No.eabd0233, 2020. https://doi.org/10.1126/scirobotics.abd0233
- [4] D. Gayango, R. Salmoral, H. Romero, J. M. Carmona, A. Suarez, and A. Ollero, “Benchmark evaluation of hybrid fixed-flapping wing aerial robot with autopilot architecture for autonomous outdoor flight operations,” IEEE Robotics and Automation Letters, Vol.8, pp. 4243-4250, 2023. https://doi.org/10.1109/LRA.2023.3280753
- [5] Y.-W. Chin, J. M. Kok, Y.-Q. Zhu, W.-L. Chan, J. S. Chahl, B. C. Khoo, and G.-K. Lau, “Efficient flapping wing drone arrests high-speed flight using post-stall soaring,” Science Robotics, Vol.5, Article No.eaba2386, 2020. https://doi.org/10.1126/scirobotics.aba2386
- [6] T. Nozawa, K. Nakamura, R. Katsuyama, S. Kuwajima, Z. Li, A. Nomizu, R. Okamoto, T. Munakata, and T. Watanabe, “The wifly: Flapping-wing small unmanned aerial vehicle with center-of-gravity shift mechanism,” J. Robot. Mechatron., Vol.33, No.2, pp. 205-215, 2021. https://doi.org/10.20965/jrm.2021.p0205
- [7] R. Zufferey, J. Tormo-Barbero, D. Feliu-Talegón, S. R. Nekoo, J. Ángel Acosta, and A. Ollero, “How ornithopters can perch autonomously on a branch,” Nature Communications, Vol.13, Article No.7713, 2022. https://doi.org/10.1038/s41467-022-35356-5
- [8] G.-K. Lau, C.-C. Wu, Z.-X. Ren, S. Wakler, S.-C. Lin, K.-Y. Tseng, and C.-C. Lu, “Lightweight perching mechanisms for flapping-wing drones,” 2023 Int. Conf. on Advanced Robotics and Intelligent Systems (ARIS), 2023. https://doi.org/10.1109/ARIS59192.2023.10268567
- [9] J. P. Rodríguez-Gómez, R. Tapia, J. L. Paneque, P. Grau, A. G. Eguíluz, J. R. M. de Dios, and A. Ollero, “The griffin perception dataset: Bridging the gap between flapping-wing flight and robotic perception,” IEEE Robotics and Automation Letters, Vol.6, pp. 1066-1073, 2021. https://doi.org/10.1109/LRA.2021.3056348
- [10] H. Huang, W. He, Q. Fu, X. He, and C. Sun, “A bio-inspired flapping-wing robot with cambered wings and its application in autonomous airdrop,” IEEE/CAA J. of Automatica Sinica, Vol.9, pp. 2138-2150, 2022. https://doi.org/10.1109/jas.2022.106040
- [11] W. Shyy, H. Aono, C.-k. Kang, and H. Liu, “An Introduction to Flapping Wing Aerodynamics,” Cambridge University Press, 2013. https://doi.org/10.1017/CBO9781139583916
- [12] H. Huang, W. He, J. Wang, L. Zhang, and Q. Fu, “An all servo-driven bird-like flapping-wing aerial robot capable of autonomous flight,” IEEE/ASME Trans. on Mechatronics, Vol.27, pp. 5484-5494, 2022. https://doi.org/10.1109/TMECH.2022.3182418
- [13] I. D. de-los Rios, A. Suarez, E. Sanchez-Laulhe, I. Armengol, and A. Ollero, “Winged aerial robot: Modular design approach,” 2021 IEEE Int. Symposium on Safety, Security, and Rescue Robotics (SSRR), pp. 190-195, 2021. https://doi.org/10.1109/SSRR53300.2021.9597868
- [14] H. Sato, M. L. Afakh, and N. Takesue, “Development of flapping-wing robot with independently controllable wings,” The Abstracts of the Int. Conf. on Advanced Mechatronics: Toward Evolutionary Fusion of It and Mechatronics (ICAM), Vol.2021.7, GS6-2, 2021. https://doi.org/10.1299/jsmeicam.2021.7.GS6-2
- [15] L.-J. Yang, V. J. Joseph, Y.-L. Lo, W.-T. Tang, B. Esakki, S. Kompala, and P. Veeranjaneyulu, “Aerodynamic evaluation of flapping wings with leading-edge twisting,” Biomimetics, Vol.8, Article No.134, 2023. https://doi.org/10.3390/biomimetics8020134
- [16] T. Vanneste, J.-B. Paquet, S. Grondel, and C. Eric, “Aeroelastic simulation of flexible flapping wing based on structural fem and quasi steady aerodynamic model,” 28th Congress of the Int. Council of the Aeronautical Sciences 2012 (ICAS2012), Vol.3, 2012.
- [17] R. Tapia, A. C. Satue, S. R. Nekoo, J. R. M. de Dios, and A. Ollero, “Experimental energy consumption analysis of a flapping-wing robot,” arXiv:2306.00848, 2023. https://doi.org/10.48550/arXiv.2306.00848
- [18] M. L. Afakh, T. Sato, H. Sato, and N. Takesue, “Development of flapping robot with self-takeoff from the ground capability,” 2021 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 321-327, 2021. https://doi.org/10.1109/ICRA48506.2021.9561656
- [19] M. L. Afakh, H. Sato, and N. Takesue, “A study towards a flapping robot maintaining attitude during gliding,” Int. J. on Advanced Science, Engineering and Information Technology, Vol.13, No.2, pp. 681-687, 2023.
- [20] S. Macenski, T. Foote, B. Gerkey, C. Lalancette, and W. Woodall, “Robot operating system 2: Design, architecture, and uses in the wild,” Science Robotics, Vol.7, No.66, Article No.eabm6074, 2022. https://doi.org/10.1126/scirobotics.abm6074
- [21] K. Krishnan, B. Garde, A. Bennison, N. C. Cole, E.-L. Cole, J. Darby, K. H. Elliott, A. Fell, A. Gómez-Laich, S. de Grissac, M. Jessopp, E. Lempidakis, Y. Mizutani, A. Prudor, M. Quetting, F. Quintana, H. Robotka, A. Roulin, P. G. Ryan, K. Schalcher, S. Schoombie, V. Tatayah, F. Tremblay, H. Weimerskirch, S. Whelan, M. Wikelski, K. Yoda, A. Hedenström, and E. L. C. Shepard, “The role of wingbeat frequency and amplitude in flight power,” J. of The Royal Society Interface, Vol.19, No.193, Article No.20220168, 2022. https://doi.org/10.1098/rsif.2022.0168
- [22] T. W. Bachmann, “Anatomical, morphometrical and biomechanical studies of barn owls’ and pigeons’ wings,” Ph.D. dissertation, RWTH Aachen University, 2010.
- [23] D. Colmenares, R. Kania, W. Zhang, and M. Sitti, “Bio-inspired flexible twisting wings increase lift and efficiency of a flapping wing micro air vehicle,” arXiv:2001.11586, 2020. https://doi.org/10.48550/arXiv.2001.11586
- [24] T. Q. Truong, V. H. Phan, H. C. Park, and J. H. Ko, “Effect of wing twisting on aerodynamic performance of flapping wing system,” AIAA J., Vol.51, No.7, pp. 1612-1620, 2013. https://doi.org/10.2514/1.J051831
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.