Paper:
Flight Control Based on Adaptive Output Feedback for Quadrotors Using Quaternions
Shinji Adachi*, Chenyang Zhu*, and Ikuro Mizumoto**

*Graduate School of Science and Technology, Kumamoto University
2-39-1 Kurokami, Chuo-ku, Kumamoto, Kumamoto 860-8555, Japan
**Faculty of Advanced Science and Technology, Kumamoto University
2-39-1 Kurokami, Chuo-ku, Kumamoto, Kumamoto 860-8555, Japan

Quadrotors are expected to play an active role in out-of-sight areas such as equipment inspection and transportation of supplies to disaster areas. However, ensuring stable and highly accurate automatic flights has become a significant challenge. Trajectory tracking control methods that combine adaptive output feedback control based on almost strictly positive real characteristics and backstepping strategy have been proposed for a quadrotor control system with nonlinearities. These methods have simple structures and are robust. However, existing adaptive control methods have the problem of singularities, owing to the use of Euler angles in the modeling of quadrotors. In this paper, we propose an adaptive control method that enables a wider range of attitude changes using quaternions. The effectiveness of the proposed method is validated through numerical simulations.
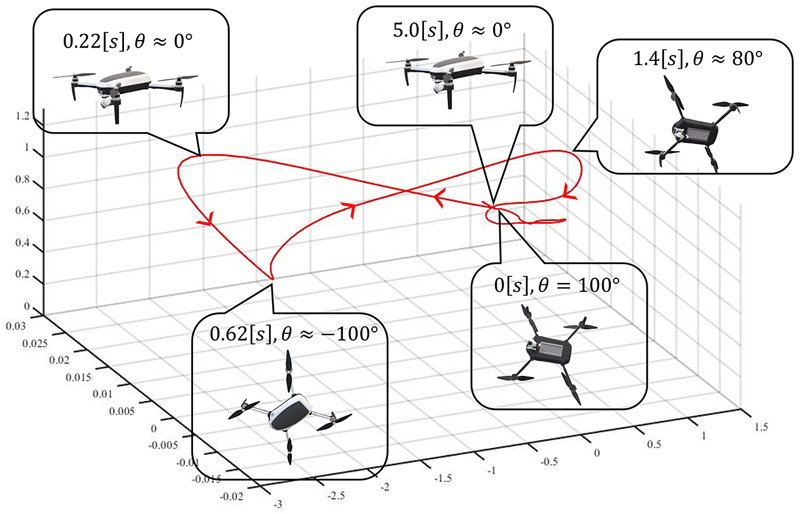
Space trajectory of the controlled quadrotor
- [1] K. Nonami, “Drone technology, cutting-edge drone business, and future prospects,” J. Robot. Mechatron., Vol.28, No.3, pp. 262-272, 2016. https://doi.org/10.20965/jrm.2016.p0262
- [2] K. Nonami, “Research and development of drone and roadmap to evolution,” J. Robot. Mechatron., Vol.30, No.3, pp. 322-336, 2018. https://doi.org/10.20965/jrm.2018.p0322
- [3] G. V. Raffo, M. G. Ortega, and F. R. Rubio, “Backstepping/nonlinear H∞ control for path tracking of a quadrotor unmanned aerial vehicle,” Prof. of the 2008 American Control Conf., pp. 3356-3361, 2008. https://doi.org/10.1109/ACC.2008.4587010
- [4] T. Madani and A. Benallegue, “Adaptive control via backstepping technique and neural networks of a quadrotor helicopter,” IFAC Proc. Volumes, Vol.41, No.2, pp. 6513-6518, 2008. https://doi.org/10.3182/20080706-5-KR-1001.01098
- [5] K. Hotta, M. Yamada, and T. Ooba, “Adaptive tracking control of a four-rotor mini helicopter based on backstepping technique,” Trans. Soc. Instrum. Control Eng., Vol.50, No.2, pp. 177-184, 2014 (in Japanese). https://doi.org/10.9746/sicetr.50.177
- [6] T. Madani and A. Benallegue, “Sliding mode observer and backstepping control for a quadrotor unmanned aerial vehicles,” Prof. Am. Control Conf., pp. 5887-5892, 2007. https://doi.org/10.1109/ACC.2007.4282548
- [7] H. Bouadi, M. Bouchoucha, and M. Tadjine, “Sliding mode control based on backstepping approach for an UAV type-quadrotor,” World Acad. Sci. Eng. Technol., Vol.1, No.2, pp. 39-44, 2007. https://doi.org/10.5281/zenodo.1077447
- [8] S. Suzuki, K. Nonami, and S. Sakai, “Continuous trajectory following control of small-scale unmanned helicopter by using model following based sliding mode control,” Trans. Jpn. Soc. Mech. Eng., Ser. C, Vol.72, No.721, pp. 2795-2802, 2006 (in Japanese). https://doi.org/10.1299/kikaic.72.2795
- [9] K. Motonaka, S. Maeyama, and K. Watanabe, “Offline optimization of gains for kinodynamic motion planning for an X4-flyer,” SICE Annual Conf., pp. 2727-2731, 2013.
- [10] K. Motonaka, K. Watanabe, and S. Maeyama, “Kinodynamic motion planning and control for a quadrotor,” Trans. JSME, Vol.81, No.825, Article No.14-00631, 2015 (in Japanese). https://doi.org/10.1299/transjsme.14-00631
- [11] Y. Oda and M. Kumon, “Autonomous flight control of quadrotor helicopter by simple adaptive control with inner loop PD controller,” J. Robot. Mechatron., Vol.30, No.3, pp. 380-389, 2018. https://doi.org/10.20965/jrm.2018.p0380
- [12] I. Mizumoto, T. Nakamura, and M. Kumon, “Adaptive control system design of a quadrotor by high gain based feedback control via backstepping strategy with an inner-loop PFC,” Proc. 12th Int. Conf. Motion Vib. Control, Article No.2B37. 2014. https://doi.org/10.1299/jsmemovic.2014.12._2B37-1_
- [13] I. Mizumoto, T. Nakamura, and M. Kumon, “Adaptive trajectory tracking control system design for a quadrotor with an inner-loop PFC,” Proc. 14th Int. Conf. Motion Vib. Control, Article No.B108, 2015 (in Japanese). https://doi.org/10.1299/jsmemovic.2015.14.105
- [14] K. Minehara, R. Ogawa, and I. Mizumoto, “Flight control of quadrotor by output feedback via optical flow sencer,” Pap. Tech. Meet. Control IEE Jpn., CT 2021(13-32), pp. 83-88, 2021 (in Japanese).
- [15] A. Abdessameud and A. Tayebi, “Global trajectory tracking control of VTOL-UAVs without linear velocity measurements,” Automatica, Vol.46, No.6, pp. 1053-1059, 2010. https://doi.org/10.1016/j.automatica.2010.03.010
- [16] K. Fujimoto, M. Yokoyama, and Y. Tanabe, “Position and yaw angle control for a four rotor mini helicopter based on a geometric approach,” Trans. Jpn. Soc. Mech. Eng., Ser. C, Vol.78, No.785, pp. 126-137, 2012 (in Japanese). https://doi.org/10.1299/kikaic.78.126
- [17] K. Fujimoto, M. Yokoyama, and Y. Tanabe, “I&I-based adaptive control of a four-rotor mini helicopter with uncertain aerodynamic parameters,” Trans. Jpn. Soc. Mech. Eng., Ser. C, Vol.77, No.782, pp. 3721-3736, 2011 (in Japanese). https://doi.org/10.1299/kikaic.77.3721
- [18] Z. Iwai, I. Mizumoto, and H. Ohtsuka, “Simple Adaptive Control (SAC),” Morikita Publishing Co., Ltd., 2008 (in Japanese).
- [19] I. Mizumoto, D. Ikeda, T. Hirahata, and Z. Iwai, “Design of discrete time adaptive PID control systems with parallel feedforward compensator,” Control Eng. Pract., Vol.18, No.2, pp. 168-176, 2010. https://doi.org/10.1016/j.conengprac.2009.09.003
- [20] A. Ishidori, “Nonlinear Control Systems,” 3rd ed., Springer, 1995.
- [21] Z. Yao, K. Akaike, and I. Mizumoto, “Adaptive output regulation based on internal model principle for systems, with uncertain disturbances and reference signals,” SICE J. Control, Meas. Syst. Integr., Vol.14, No.1, pp. 169-179, 2021. https://doi.org/10.1080/18824889.2021.1938490
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.