Paper:
Research on Tilt-Rotor Type Water-Air Multicopter
Naoki Hatsuda* and Masafumi Miwa**
*Graduate School of Sciences and Technology for Innovation, Tokushima University
2-1 Minamijosanjima-cho, Tokushima, Tokushima 770-8506, Japan
**Graduate School of Technology, Industrial and Social Sciences, Tokushima University
2-1 Minamijosanjima-cho, Tokushima, Tokushima 770-8506, Japan

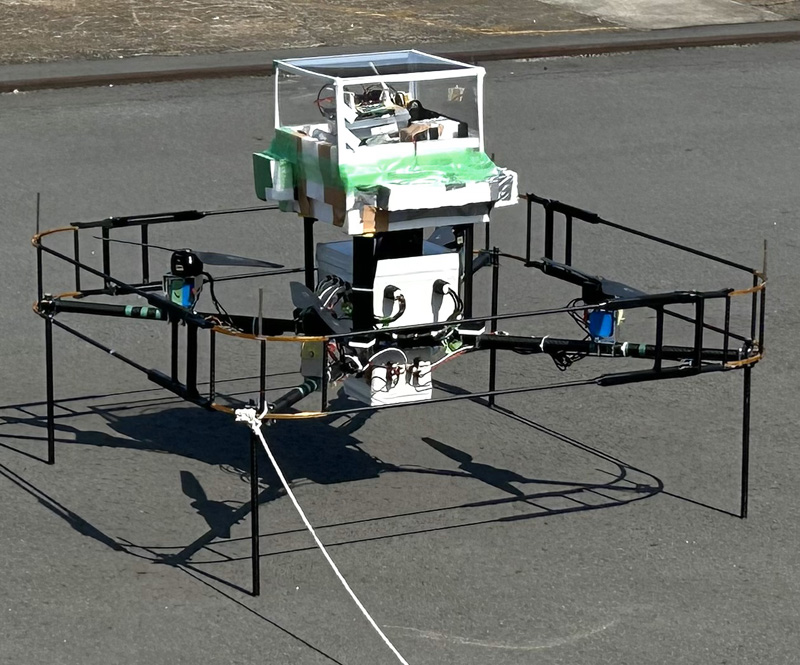
In Japan today, aging infrastructures such as dams and bridges are becoming an issue. We considered that the use of a hydrofoil multicopter would be an effective method for inspecting and surveying such facilities. When using a hydrofoil multicopter, it is possible to take off from the shore, land on the water, and dive without using a ship. The aircraft developed in this study has the capability to communicate with the land. The aircraft developed in this study is equipped with a communication buoy, and after landing on the water, a communication cable is extended from the buoy to enable underwater maneuvering via wired communication. We report on the development of a precise control system for flight and diving of this aircraft.
We researched water-air multicopter
- [1] T. Maki, H. Kondo, T. Ura, Y. Nose, and T. Sakamaki, “Observation of artificial structures by autonomous underwater vehicle,” J. of the Japan Society of Naval Architects and Ocean Engineers, Vol.1, pp. 17-26, 2005 (in Japanese). https://doi.org/10.2534/jjasnaoe.1.17
- [2] H. Alzu’bi, I. Mansour, and O. Rawashdeh, “Loon Copter: Implementation of a hybrid unmanned aquatic–aerial quadcopter with active buoyancy control,” J. of Field Robotics, Vol.35, No.5, pp. 764-778, 2018. https://doi.org/10.1002/rob.21777
- [3] D. A. Mercado, M. M. Maia, and F. J. Diez, “Aerial-underwater systems, a new paradigm in unmanned vehicles,” J. of Intelligent & Robotic Systems, Vol.95, pp. 229-238, 2019. https://doi.org/10.1007/s10846-018-0820-x
- [4] Y. Takigawa and M. Miwa, “Development of Diving Tilt Rotor UAV,” The Proc. of Conf. of Chugoku-Shikoku Branch, Vol.59, Article No.10b3, 2021 (in Japanese). https://doi.org/10.1299/jsmecs.2021.59.10b3
- [5] Y. Takigawa and M. Miwa, “Development of diving tilt rotor UAV,” The 15th Int. Conf. on Intelligent Unmanned Systems (ICIUS), Article No.0068, 2019.
- [6] T. Mori (revised by H. Kimura), “Model Airplanes [Theory and Practice],” p. 105, Denpazikkensya, 1978 (in Japanese).
- [7] H. Ohashi, “Fluid Mechanics (1),” p. 2, Corona Publishing Co., Ltd., 1982 (in Japanese).
- [8] Y. Motoki and M. Miwa, “Development of communication system for amphibious multicopter,” The Proc. of JSME Annual Conf. on Robotics and Mechatronics, Vol.2021, Article No.1P2-B06, 2021 (in Japanese). https://doi.org/10.1299/jsmermd.2021.1P2-B06
- [9] Y. Motoki and M. Miwa, “Development of communication system for amphibious multicopter,” The 17th Int. Conf. on Intelligent Unmanned Systems (ICIUS), Article No.ICIUS-2021-33, 2021.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.