Paper:
Adaptation of Motor Control Through Transferring Mirror-Image Kinematics Between Dual Arms
Sota Nakamura
 and Yuichi Kobayashi
and Yuichi Kobayashi
Shizuoka University
3-5-1 Johoku, Chuo-ku, Hamamatsu, Shizuoka 432-8561, Japan

Developing a learning model that adapts to changes in the body is critical for improving the flexibility of machine intelligence. During recovery from a controller malfunction, humans use the information obtained from previous experiences. One possible explanation for the recovery process is that information from the remaining controller was transformed and used. Modeling this mechanism will aid in the development of an adaptive motor-learning model capable of quickly recovering from controller malfunctions. We proposed a learning model for explaining the reused information of the remaining controllers in a pair of controllers. Simulations of a pair of upper limbs validated that the learning model could find a simple transformation, such as a reflection between the left and right arms, using optimization.
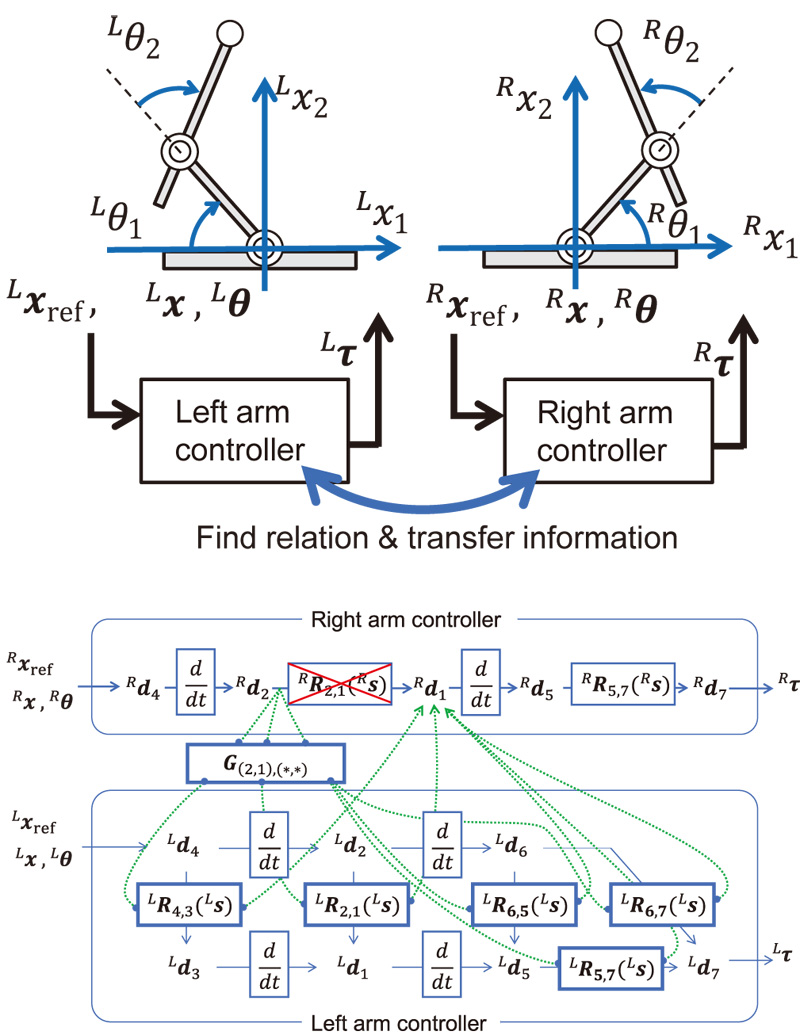
Transformation of controller information
- [1] T. Lesort et al., “Continual learning for robotics: Definition, framework, learning strategies, opportunities and challenges,” Information Fusion, Vol.58, pp. 52-68, 2020. https://doi.org/10.1016/j.inffus.2019.12.004
- [2] M. A. Rana et al., “Towards coordinated robot motions: End-to-end learning of motion policies on transform trees,” 2021 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 7792-7799, 2021. https://doi.org/10.1109/IROS51168.2021.9636097
- [3] S. Levine, C. Finn, T. Darrell, and P. Abbeel, “End-to-end training of deep visuomotor policies,” The J. of Machine Learning Research, Vol.17, No.1, pp. 1334-1373, 2016.
- [4] D. Driess et al., “PaLM-E: An embodied multimodal language model,” arXiv:2303.03378, 2023. https://doi.org/10.48550/arXiv.2303.03378
- [5] N. Saito, T. Ogata, H. Mori, S. Murata, and S. Sugano, “Tool-use model to reproduce the goal situations considering relationship among tools, objects, actions and effects using multimodal deep neural networks,” Frontiers in Robotics and AI, Vol.8, Article No.748716, 2021. https://doi.org/10.3389/frobt.2021.748716
- [6] Y. Kobayashi and S. Hosoe, “Planning-space shift motion generation: Variable-space motion planning toward flexible extension of body schema,” J. of Intelligent & Robotic Systems, Vol.62, No.3, pp. 467-500, 2011. https://doi.org/10.1007/s10846-010-9465-0
- [7] A. Cangelosi and M. Schlesinger, “Developmental Robotics: From Babies to Robots,” The MIT Press, 2015. https://doi.org/10.7551/mitpress/9320.001.0001
- [8] L. P. Fried et al., “Frailty in older adults: Evidence for a phenotype,” The J. of Gerontology: Series A, Vol.56, No.3, pp. M146-M157, 2001. https://doi.org/10.1093/gerona/56.3.M146
- [9] T. Kondo, J. Ota, R. Chiba, Q. An, and K. Kutsuzawa, “Special issue on systems science of hyper-adaptability,” J. Robot. Mechatron., Vol.34, No.4, p. 699, 2022. https://doi.org/10.20965/jrm.2022.p0699
- [10] A. Ishida et al., “Dynamic interaction between cortico-brainstem pathways during training-induced recovery in stroke model rats,” J. of Neuroscience, Vol.39, No.37, pp. 7306-7320, 2019. https://doi.org/10.1523/JNEUROSCI.0649-19.2019
- [11] Z. C. Chao, M. Sawada, T. Isa, and Y. Nishimura, “Dynamic reorganization of motor networks during recovery from partial spinal cord injury in monkeys,” Cerebral Cortex, Vol.29, No.7, pp. 3059-3073, 2019. https://doi.org/10.1093/cercor/bhy172
- [12] T. Isa, M. Mitsuhashi, and R. Yamaguchi, “Alternative routes for recovery of hand functions after corticospinal tract injury in primates and rodents,” Current Opinion in Neurology, Vol.32, No.6, pp. 836-843, 2019. https://doi.org/10.1097/WCO.0000000000000749
- [13] F. Alet, T. Lozano-Perez, and L. P. Kaelbling, “Modular meta-learning,” Proc. of the 2nd Conf. on Robot Learning (CoRL 2018), pp. 856-868, 2018.
- [14] C. Finn, P. Abbeel, and S. Levine, “Model-agnostic meta-learning for fast adaptation of deep networks,” Proc. of the 34th Int. Conf. on Machine Learning (ICML’17), Vol.70, pp. 1126–1135, 2017.
- [15] M. Haruno, D. M. Wolpert, and M. Kawato, “Mosaic model for sensorimotor learning and control,” Neural Computation, Vol.13, No.10, pp. 2201-2220, 2001. https://doi.org/10.1162/089976601750541778
- [16] N. Sugimoto, M. Haruno, K. Doya, and M. Kawato, “MOSAIC for multiple-reward environments,” Neural Computation, Vol.24, No.3, pp. 577-606, 2012. https://doi.org/10.1162/NECO_a_00246
- [17] Y. Kobayashi, K. Harada, and K. Takagi, “Automatic controller generation based on dependency network of multi-modal sensor variables for musculoskeletal robotic arm,” Robotics and Autonomous Systems, Vol.118, pp. 55-65, 2019. https://doi.org/10.1016/j.robot.2019.04.010
- [18] S. Nakamura, Y. Kobayashi, and T. Matsuura, “Grid-based estimation of transformation between partial relationships using a genetic algorithm,” J. Robot. Mechatron., Vol.34, No.4, pp. 786-794, 2022. https://doi.org/10.20965/jrm.2022.p0786
- [19] C. G. Atkeson, A. W. Moore, and S. Schaal, “Locally weighted learning,” Artif. Intell. Rev., Vol.11, Nos.1-5, pp. 11-73, 1997. https://doi.org/10.1023/A:1006559212014
- [20] M. Sugiyama, “Machine learning with squared-loss mutual information,” Entropy, Vol.15, No.1, pp. 80-112, 2013. https://doi.org/10.3390/e15010080
- [21] N. Hansen and A. Ostermeier, “Adapting arbitrary normal mutation distributions in evolution strategies: The covariance matrix adaptation,” Proc. of IEEE Int. Conf. on Evolutionary Computation, pp. 312-317, 1996. https://doi.org/10.1109/ICEC.1996.542381
- [22] T. Morita et al., “Hyper-adaptation in the human brain: Functional and structural changes in the foot section of the primary motor cortex in a top wheelchair racing paralympian,” Frontiers in Systems Neuroscience, Vol.16, Article No.780652, 2022. https://doi.org/10.3389/fnsys.2022.780652
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.