Paper:
Buoyancy and Propulsion Mechanisms for Stable Movement in Snow Field
Haruka Fujiuchi*, Shinichirou Sumita**, and Sadayoshi Mikami***

*Graduate School of Systems Information Science, Future University Hakodate
116-2 Kamedanakano-cho, Hakodate, Hokkaido 041-8655, Japan
**National Institute of Technology, Hakodate College
14-1 Tokura-cho, Hakodate, Hokkaido 042-0953, Japan
***Department of Complex and Intelligent Systems, Future University Hakodate
116-2 Kamedanakano-cho, Hakodate, Hokkaido 041-8655, Japan

For small-sized mobile machines, moving on snow without sinking is challenging. Snowmobiles are often used to move on snow. However, in smaller-sized machines, the skis attached to the machine become small, so small snow bumps or soft powdered snow quickly cause the entire machine to be buried under the snow. Therefore, it is necessary for small robots moving on snow to give appropriate driving mechanisms for producing propulsive force and snow-floating force. To this end, we propose new driving mechanisms, a “passive wing wheel” and a “spiral screw,” for small mobility services that move on snow without sinking or getting stuck. The passive wing wheel has transformable wing-like paddles, which extend to behave like animal feet and shrink to form a wheel if necessary. The spiral screw is designed to produce propulsive force by pushing snow particles with the screw. Additionally, by combining two sets of screws having opposite threads, they gather snow underneath the body attached to them, which causes floating force. This report also proposes ways to prepare pseudo-snow, which resembles natural snow in hardness, viscosity, and property transformation due to deformation. We conducted experiments to measure the performance of the proposed design in both the pseudo-snow and natural snow. From experiments, we confirmed that the mechanism performs well in terms of propulsion and floating on snow.
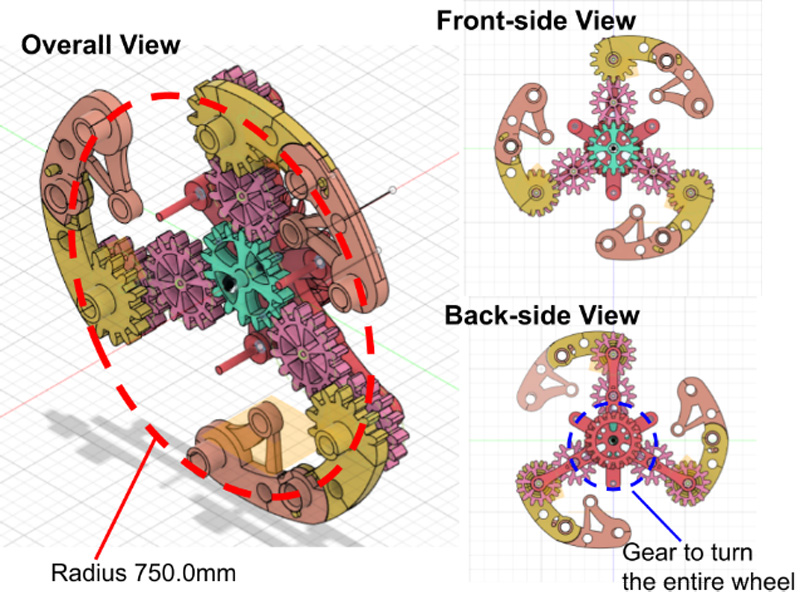
“Passive wing wheel” to progress in snow
- [1] H. Xu, C. Pan, H. Xie, and D. Zhang, “Dynamics Modeling and Simulation of a Bionic Swim Bladder System in Underwater Robotics,” J. of Bionic Engineering, Vol.5, Supplement, pp. 66-71, 2008. https://doi.org/10.1016/S1672-6529(08)60074-8
- [2] S. B. A. Kashem, S. Jawed, J. Ahmed, and U. Qidwai, “Design and Implementation of a Quadruped Amphibious Robot Using Duck Feet,” Robotics, Vol.8, No.3, Article No.77, 2019. https://doi.org/10.3390/robotics8030077
- [3] K. Uckert et al., “Investigating Habitability with an Integrated Rock-Climbing Robot and Astrobiology Instrument Suite,” Astrobiology, Vol.20, No.12, pp. 1427-1449, 2020. https://doi.org/10.1089/ast.2019.2177
- [4] H. C. Astley et al., “Surprising Simplicities and Syntheses in Limbless Self-Propulsion in Sand,” J. of Experimental Biology, Vol.223, No.5, 2020. https://doi.org/10.1242/jeb.103564
- [5] N. Kamizawa, H. G. Takahashi, and S. Kawahara, “Long-Term Changes in the Snow Days over Northern Japan,” Geographical Reports of Tokyo Metropolitan University, Vol.57, pp. 63-70, 2022.
- [6] J. Li et al., “Protecting Ice from Melting Under Sunlight via Radiative Cooling,” Science Advances, Vol.8, No.6, Article No.eabj9756, 2002. https://doi.org/10.1126/sciadv.abj9756
- [7] E. Maggiore, M. Tommasini, and P. M. Ossi, “Raman Spectroscopy-Based Assessment of the Liquid Water Content in Snow,” Molecules, Vol.27, No.3, Article No.626, 2022. https://doi.org/10.3390/molecules27030626
- [8] B. Bergfeld et al., “Crack Propagation Speeds in Weak Snowpack Layers,” J. of Glaciology, Vol.68, No.269, pp. 557-570, 2022. https://doi.org/10.1017/jog.2021.118
- [9] N. Numano, “Snow Damage in Contemporary Japan – Progress and Measures –,” J. Disaster Res., Vol.2, No.3, pp. 153-162, 2007. https://doi.org/10.20965/jdr.2007.p0153
- [10] R. Y. Dobretsov, S. A. Voinash, S. N. Dolmatov, and P. G. Kolesnikov, “Pneumatic Caterpillar Mover for a Light Transport Vehicle,” IOP Conf. Series: Earth and Environmental Science, Vol.666, Article No.042003, 2021. https://doi.org/10.1088/1755-1315/666/4/042003
- [11] S. S. Komissarov, “Mechanics of Side-Slipping in Alpine Skiing: Theory of Machining Snow and Ice,” Sports Engineering, Vol.24, No.1, Article No.4, 2021. https://doi.org/10.1007/s12283-021-00340-7
- [12] E. Abramova, G. Mashorin, Y. Molev, and A. Sogin, “The Simulations of Helical Blade Interaction with Ice,” MATEC Web Conf., Vol.245, Article No.17002, 2018. https://doi.org/10.1051/matecconf/201824517002
- [13] H. Fujiuchi and S. Mikami, “Moving Mechanism in Snow and Ice Environments Using Buoyancy and Propulsion Provided by Crawler-Mounted, ‘Double Valley Wheel,’” Proc. of the Robotics and Mechatronics Conf., Session ID 1P1-H26, 2023 (in Japanese).
- [14] S. Takaoka, K. Horikawa, A. Nagano, and T. Iwamoto, “Hollow, Variably Configured Segmented Wheel Suitable for Snow Travel,” J. Robot. Mechatron., Vol.21, No.2, pp. 216-222, 2009. https://doi.org/10.20965/jrm.2009.p0216
- [15] S. Hakamada and S. Mikami, “Passive Gripping Foot for a Legged Robot to Move Over Rough Terrain,” D. Chugo et al. (Eds.), “Robotics for Sustainable Future: CLAWAR 2021,” pp. 203-212, Springer, 2022. https://doi.org/10.1007/978-3-030-86294-7_18
- [16] G. Lee and T. Inoue, “Drag Force Based Propulsion Mechanism for Underwater Robots,” Proc. of the 10th IIAE Int. Conf. on Industrial Application Engineering, pp. 90-94, 2022. https://doi.org/10.12792/iciae2022.018
- [17] J. Hu, H. Li, and W. Chen, “A Squid-Inspired Swimming Robot Using Folding of Origami,” The J. of Engineering, Vol.2021, No.10, pp. 630-639, 2021. https://doi.org/10.1049/tje2.12075
- [18] Y. Takeuchi, Y. Nohguchi, K. Kawashima, and K. Izumi, “Measurement of Snow-Hardness Distribution,” Annals of Glaciology, Vol.26, pp. 27-30, 1998. https://doi.org/10.3189/1998AoG26-1-27-30
- [19] J. Gaume, T. Gast, J. Teran, A. van Herwijnen, and C. Jiang, “Dynamic Anticrack Propagation in Snow,” Nature Communications, Vol.9, No.1, Article No.3047, 2018. https://doi.org/https://doi.org/10.1038/s41467-018-05181-w
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.