Paper:
Comparison of Parameters of Regression Equations for Estimating the Perceptual Quantity of Pseudo-Haptics
Kazuhiro Matsui*,†
 , Iori Kikuchi*, Kotaro Okada*, Keita Atsuumi*,**
, Kazuhiro Taniguchi*,***
, Hiroaki Hirai*, and Atsushi Nishikawa*
, Iori Kikuchi*, Kotaro Okada*, Keita Atsuumi*,**
, Kazuhiro Taniguchi*,***
, Hiroaki Hirai*, and Atsushi Nishikawa*
*Graduate School of Engineering Science, Osaka University
1-3 Machikaneyama, Toyonaka, Osaka 560-8531, Japan
†Corresponding author
**Graduate School of Information Sciences, Hiroshima City University
3-4-1 Ozukahigashi, Asaminami-ku, Hiroshima, Hiroshima 731-3194, Japan
***Faculty of Human Ecology, Yasuda Women’s University
6-13-1 Yasuhigashi, Asaminami-ku, Hiroshima, Hiroshima 731-0153, Japan

Pseudo-haptics convey force haptics without the use of complex mechanical devices and are being actively researched. However, a regression equation derivation method for estimating the perception produced by pseudo-haptics is yet to be established. In this study, we compared the model parameters (factors) for weightlifting movements, aiming to establish a method for deriving a regression equation to estimate the perception produced by pseudo-haptics. Weight perception produced by pseudo-haptics was determined by changing the control-display (CD) ratio, which is the amount of object movement in virtual reality (display) divided by the amount of object movement in reality (control). The regression equation estimating the perceived weight was derived using factors such as grasping force and electromyogram. The factors used in the derivation were determined based on quality engineering methods, and it was found that factors appropriate for human motor control strategies could be selected. In addition, the investigation provides insights for the realization of applications that can generate continuous pseudo-haptics.
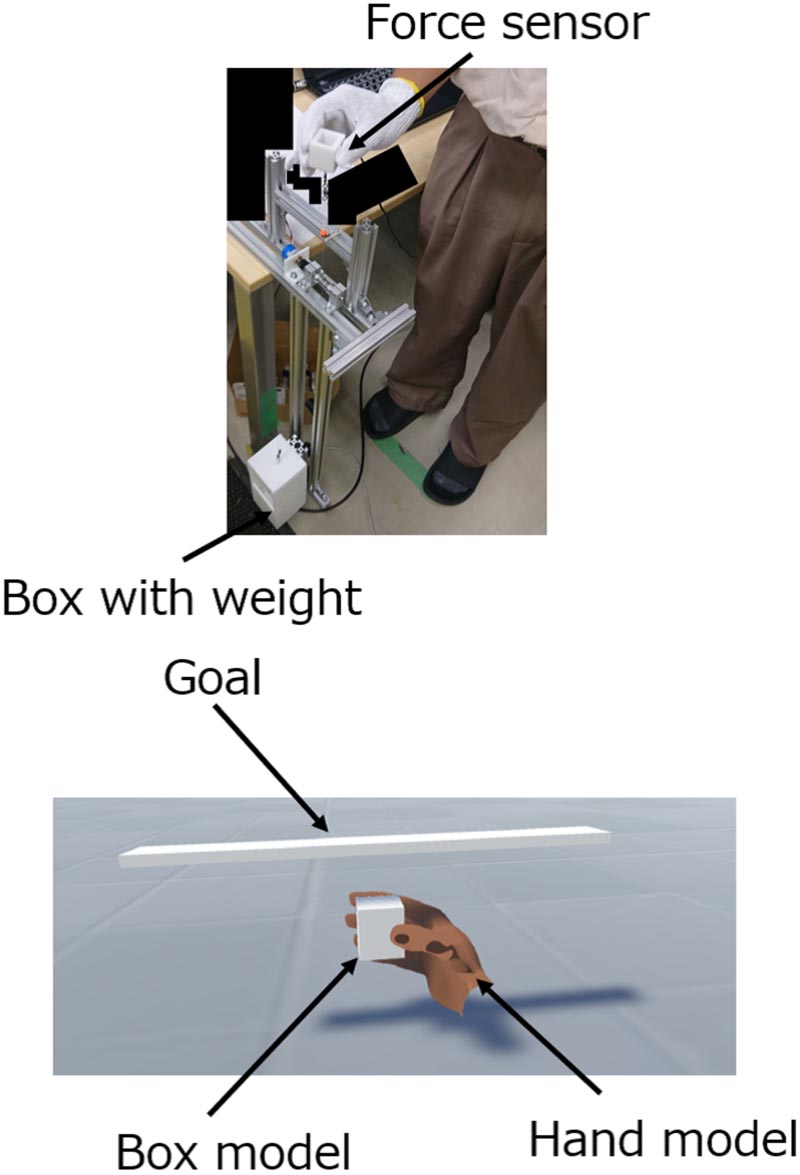
Experimental environment
- [1] T. H. Massie and J. K. Salisbury, “The PHANToM haptic interface: A device for probing virtual objects,” Proc. of the ASME Winter Annual Meeting, Symp. on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp. 295-300, 1994.
- [2] S. Nakagawara, H. Kajimoto, N. Kawakami, S. Tachi, and I. Kawabuchi, “An encounter-type multi-fingered master hand using circuitous joints,” Proc. of the 2005 IEEE Int. Conf. on Robotics and Automation, pp. 2667-2672, 2005. https://doi.org/10.1109/ROBOT.2005.1570516
- [3] L. Dominjon, A. Lecuyer, J.-M. Burkhardt, P. Richard, and S. Richir, “Influence of control/display ratio on the perception of mass of manipulated objects in virtual environments,” Proc. of IEEE Virtual Reality 2005, pp. 19-25, 2005. https://doi.org/10.1109/VR.2005.1492749
- [4] A. Lécuyer, “Simulating haptic feedback using vision: A survey of research and applications of pseudo-haptic feedback,” Presence: Teleoperators and Virtual Environments, Vol.18, No.1, pp. 39-53, 2009. https://doi.org/10.1162/pres.18.1.39
- [5] P. Issartel, F. Guéniat, S. Coquillart, and M. Ammi, “Perceiving mass in mixed reality through pseudo-haptic rendering of Newton’s third law,” 2015 IEEE Virtual Reality, pp. 41-46, 2015. https://doi.org/10.1109/VR.2015.7223322
- [6] F. R. Sarlegna, G. Baud-Bovy, and F. Danion, “Delayed visual feedback affects both manual tracking and grip force control when transporting a handheld object,” J. of Neurophysiology, Vol.104, No.2, pp. 641-653, 2010. https://doi.org/10.1152/jn.00174.2010
- [7] Y. Hirao, R. Mitsuya, and T. Kawai, “Weight sense representation using cross-modality in virtual reality,” Trans. of the Virtual Reality Society of Japan, Vol.23, No.4, pp. 263-270, 2018 (in Japanese). https://doi.org/10.18974/tvrsj.23.4_263
- [8] M. Samad, E. Gatti, A. Hermes, H. Benko, and C. Parise, “Pseudo-haptic weight: Changing the perceived weight of virtual objects by manipulating control-display ratio,” Proc. of the 2019 CHI Conf. on Human Factors in Computing Systems (CHI’19), Article No.320, 2019. https://doi.org/10.1145/3290605.3300550
- [9] Y. Ujitoko and Y. Ban, “Survey of pseudo-haptics: Haptic feedback design and application proposals,” IEEE Trans. on Haptics, Vol.14, No.4, pp. 699-711, 2021. https://doi.org/10.1109/TOH.2021.3077619
- [10] Y. Wada and M. Kawato, “A neural network model for arm trajectory formation using forward and inverse dynamics models,” Neural Networks, Vol.6, No.7, pp. 919-932, 1993. https://doi.org/10.1016/S0893-6080(09)80003-8
- [11] T. Ishikawa, S. Tomatsu, J. Izawa, and S. Kakei, “The cerebro-cerebellum: Could it be loci of forward models?,” Neuroscience Research, Vol.104, pp. 72-79, 2016. https://doi.org/10.1016/j.neures.2015.12.003
- [12] N. Ramnani, “The primate cortico-cerebellar system: Anatomy and function,” Nature Reviews Neuroscience, Vol.7, No.7, pp. 511-522, 2006. https://doi.org/10.1038/nrn1953
- [13] D. M. Wolpert and M. Kawato, “Multiple paired forward and inverse models for motor control,” Neural Networks, Vol.11, Nos.7-8, pp. 1317-1329, 1998. https://doi.org/10.1016/S0893-6080(98)00066-5
- [14] J. R. Flanagan and M. A. Beltzner, “Independence of perceptual and sensorimotor predictions in the size-weight illusion,” Nature Neuroscience, Vol.3, No.7, pp. 737-741, 2000. https://doi.org/10.1038/76701
- [15] H. Isozumi, K. Ishibashi, and K. Iwanaga, “Study on the quantitative evaluation of haptics induced by visual stimulus,” The Japanese J. of Ergonomics, Vol.56, No.5, pp. 208-211, 2020 (in Japanese). https://doi.org/10.5100/jje.56.208
- [16] J. R. Flanagan and A. M. Wing, “The role of internal models in motion planning and control: Evidence from grip force adjustments during movements of hand-held loads,” J. of Neuroscience, Vol.17, No.4, pp. 1519-1528, 1997. https://doi.org/10.1523/JNEUROSCI.17-04-01519.1997
- [17] S. Morioka, A. Matsuo, and F. Yagi, “The influence of size perception and internal modeling on the control process while lifting,” J. of Physiological Anthropology, Vol.25, No.2, pp. 163-169, 2006. https://doi.org/10.2114/jpa2.25.163
- [18] M. J. M. Hoozemans and J. H. van Dieën, “Prediction of handgrip forces using surface EMG of forearm muscles,” J. of Electromyography and Kinesiology, Vol.15, No.4, pp. 358-366, 2005. https://doi.org/10.1016/j.jelekin.2004.09.001
- [19] H. Aoki, “Study on muscle activity during pseudo-haptics occurrence by electromyogram measurement,” Electronics and Communications in Japan, Vol.102, No.3, pp. 63-69, 2019. https://doi.org/10.1002/ecj.12152
- [20] Y. Tzeng and F. Chen, “A simple approach for robust design of high-speed electrical-discharge machining technology,” Int. J. of Machine Tools and Manufacture, Vol.43, No.3, pp. 217-227, 2003. https://doi.org/10.1016/S0890-6955(02)00261-4
- [21] G. Aguirre-Ollinger, J. E. Colgate, M. A. Peshkin, and A. Goswami, “Active-impedance control of a lower-limb assistive exoskeleton,” 2007 IEEE 10th Int. Conf. on Rehabilitation Robotics, pp. 188-195, 2007. https://doi.org/10.1109/ICORR.2007.4428426
- [22] Z. Taha et al., “IIR filter order and cut-off frequency influences on EMG signal smoothing,” Biomedical Research, Vol.26, No.4, pp. 616-620, 2015.
- [23] T. Kuroda and E. Hasuo, “The very first step to start psychophysical experiments,” Acoustical Science and Technology, Vol.35, No.1, pp. 1-9, 2014. https://doi.org/10.1250/ast.35.1
- [24] R. Ratcliff, “Methods for dealing with reaction time outliers,” Psychological Bulletin, Vol.114, No.3, pp. 510-532, 1993. https://psycnet.apa.org/doi/10.1037/0033-2909.114.3.510
- [25] P. A. Nee, S. Bonney, P. Madden, and J. Overfield, “Transfusion of stored red blood cells in critical illness: Impact on tissue oxygenation,” J. of the Intensive Care Society, Vol.11, No.4, pp. 240-244, 2010. https://doi.org/10.1177/175114371001100406
- [26] J. Liu, C. H. Tan, T. Badrick, and T. P. Loh, “Moving standard deviation and moving sum of outliers as quality tools for monitoring analytical precision,” Clinical Biochemistry, Vol.52, pp. 112-116, 2018. https://doi.org/10.1016/j.clinbiochem.2017.10.009
- [27] A. Alfons, C. Croux, and S. Gelper, “Sparse least trimmed squares regression for analyzing high-dimensional large data sets,” The Annals of Applied Statistics, Vol.7, No.1, pp. 226-248, 2013. https://doi.org/10.1214/12-AOAS575
- [28] H. Shimizu, “An introduction to the statistical free software HAD: Suggestions to improve teaching, learning and practice data analysis,” J. of Media, Information and Communication, Vol.1, pp. 59-73, 2016 (in Japanese).
- [29] A. Mizumoto and O. Takeuchi, “Basics and considerations for reporting effect sizes in research papers,” Studies in English Language Teaching, Vol.31, pp. 57-66, 2008 (in Japanese).
- [30] G. Westling and R. S. Johansson, “Factors influencing the force control during precision grip,” Experimental Brain Research, Vol.53, No.2, pp. 277-284, 1984. https://doi.org/10.1007/BF00238156
- [31] J. H. Lawrence and C. J. De Luca, “Myoelectric signal versus force relationship in different human muscles,” J. of Applied Physiology, Vol.54, No.6, pp. 1653-1659, 1983. https://doi.org/10.1152/jappl.1983.54.6.1653
- [32] R. C. Mitchell and R. T. Carson, “Using Surveys to Value Public Goods: The Contingent Valuation Method,” RFF Press, 1989.
- [33] E. E. Brodie and H. E. Ross, “Sensorimotor mechanisms in weight discrimination,” Perception & Psychophysics, Vol.36, No.5, pp. 477-481, 1984. https://doi.org/10.3758/BF03207502
- [34] Y. Hiramatsu, D. Kimura, K. Kadota, T. Ito, and H. Kinoshita, “Control of precision grip force in lifting and holding of low-mass objects,” PLOS ONE, Vol.10, No.9, Article No.e0138506, 2015. https://doi.org/10.1371/journal.pone.0138506
- [35] M. Rietzler, G. Haas, T. Dreja, F. Geiselhart, and E. Rukzio, “Virtual muscle force: Communicating kinesthetic forces through pseudo-haptic feedback and muscle input,” Proc. of the 32nd Annual ACM Symp. on User Interface Software and Technology (UIST’19), pp. 913-922, 2019. https://doi.org/10.1145/3332165.3347871
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.