Paper:
Automatic Lane-Changing System on Congested Highway
Hanwool Woo*
 , Hiroto Tetsuka**, and Jongseong Gwak***
, Hiroto Tetsuka**, and Jongseong Gwak***
*Department of Mechanical Systems Engineering, Faculty of Engineering, Kogakuin University
2665-1 Nakano-machi, Hachioji, Tokyo 192-0015, Japan
**Graduate School of Regional Development and Creativity, Utsunomiya University
7-1-2 Yoto, Utsunomiya, Tochigi 321-8585, Japan
***Department of Computer Science, Faculty of Engineering, Takushoku University
815-1 Tatemachi, Hachioji, Tokyo 193-0985, Japan

This study proposes an autonomous lane-changing system for congested merging areas. Manual and autonomous vehicles are expected to coexist until all vehicles are substituted by autonomous vehicles. Therefore, interactions between humans and autonomous driving systems should be discussed. This study assumed a scenario in which an autonomous vehicle performed a lane change to a congested main lane, where all vehicles were manual. The proposed system estimated the possibility of changing lanes without collisions. A driving simulator was used to measure the lane-changing operations of human drivers in a congested merging area, and the proposed method was developed based on the experimental results. Simulations demonstrated that the proposed method could safely change lanes.
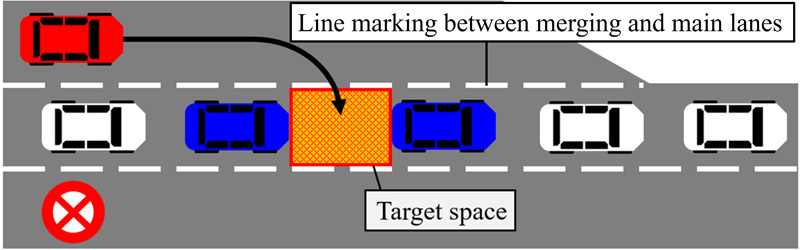
Lane change to a congested main lane
- [1] National Highway Traffic Safety Administration of U.S. Department of Transportation, “Lane change/merge crashes: Problem size assessment and statistical description,” Report No.DOT HS 808 075, 1994.
- [2] T. Toledo, H. N. Koutsopoulos, and M. E. Ben-Akiva, “Modeling integrated lane-changing behavior,” Transportation Research Record, Vol.1857, No.1, pp. 30-38, 2003. https://doi.org/10.3141/1857-04
- [3] K. I. Ahmed, M. E. Ben-Akiva, H. N. Koutsopoulos, and R. G. Mishalani, “Models of freeway lane changing and gap acceptance behavior,” Proc. of the 13th Int. Symp. on Transportation and Traffic Theory, pp. 501-515, 1996.
- [4] F. Marczak, W. Daamen, and C. Buisson, “Merging behaviour: Empirical comparison between two sites and new theory development,” Transportation Research Part C: Emerging Technologies, Vol.36, pp. 530-546, 2013. https://doi.org/10.1016/j.trc.2013.07.007
- [5] L. Zhao, J. Sun, and H. M. Zhang, “Observations and analysis of multistep-approach lane changes at expressway merge bottlenecks in Shanghai, China,” Transportation Research Record, Vol.2395, No.1, pp. 73-82, 2013. https://doi.org/10.3141/2395-09
- [6] H. Yajima and K. Takami, “Inter-vehicle communication protocol design for a yielding decision at an unsignalized intersection and evaluation of the protocol using radio control cars equipped with Raspberry Pi,” Computers, Vol.8, No.1, Article No.16, 2019. https://doi.org/10.3390/computers8010016
- [7] Y. Ali, Z. Zheng, M. M. Haque, M. Yildirimoglu, and S. Washington, “Understanding the discretionary lane-changing behaviour in the connected environment,” Accident Analysis & Prevention, Vol.137, Article No.105463, 2020. https://doi.org/10.1016/j.aap.2020.105463
- [8] L. Li, J. Gan, K. Zhou, X. Qu, and B. Ran, “A novel lane-changing model of connected and automated vehicles: Using the safety potential field theory,” Physica A: Statistical Mechanics and its Applications, Vol.559, Article No.125039, 2020. https://doi.org/10.1016/j.physa.2020.125039
- [9] A. Talebpour, H. S. Mahmassani, and S. H. Hamdar, “Modeling lane-changing behavior in a connected environment: A game theory approach,” Transportation Research Procedia, Vol.7, pp. 420-440, 2015. https://doi.org/10.1016/j.trpro.2015.06.022
- [10] Y. Luo, Y. Xiang, K. Cao, and K. Li, “A dynamic automated lane change maneuver based on vehicle-to-vehicle communication,” Transportation Research Part C: Emerging Technologies, Vol.62, pp. 87-102, 2016. https://doi.org/10.1016/j.trc.2015.11.011
- [11] L. C. Davis, “Effect of adaptive cruise control systems on traffic flow,” Physical Review E, Vol.69, No.6, Article No.066110, 2004. https://doi.org/10.1103/PhysRevE.69.066110
- [12] H. Woo and J. Gwak, “Evaluation of advanced adaptive cruise control based on lane-change detection,” 2022 22nd Int. Conf. on Control, Automation and Systems (ICCAS), pp. 393-396, 2022. https://doi.org/10.23919/ICCAS55662.2022.10003876
- [13] V. A. Butakov and P. Ioannou, “Personalized driver/vehicle lane change models for ADAS,” IEEE Trans. on Vehicular Technology, Vol.64, No.10, pp. 4422-4431, 2014. https://doi.org/10.1109/TVT.2014.2369522
- [14] L. Wan, P. Raksincharoensak, K. Maeda, and M. Nagai, “Lane change behavior modeling for autonomous vehicles based on surroundings recognition,” Int. J. of Automotive Engineering, Vol.2, No.2, pp. 7-12, 2011. https://doi.org/10.20485/jsaeijae.2.2_7
- [15] T. Shamir, “How should an autonomous vehicle overtake a slower moving vehicle: Design and analysis of an optimal trajectory,” IEEE Trans. on Automatic Control, Vol.49, No.4, pp. 607-610, 2004. https://doi.org/10.1109/TAC.2004.825632
- [16] V. Milanés and S. E. Shladover, “Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data,” Transportation Research Part C: Emerging Technologies, Vol.48, pp. 285-300, 2014. https://doi.org/10.1016/j.trc.2014.09.001
- [17] Y. Wang, G. Gunter, M. Nice, M. L. D. Monache, and D. B. Work, “Online parameter estimation methods for adaptive cruise control systems,” IEEE Trans. on Intelligent Vehicles, Vol.6, No.2, pp. 288-298, 2021. https://doi.org/10.1109/TIV.2020.3023674
- [18] J. Marzbanrad and I. T. Moghaddam, “Self-tuning control algorithm design for vehicle adaptive cruise control system through real-time estimation of vehicle parameters and road grade,” Vehicle System Dynamics, Vol.54, No.9, pp. 1291-1316, 2016. https://doi.org/10.1080/00423114.2016.1199886
- [19] T. Hiraoka, M. Tanaka, H. Kumamoto, T. Izumi, and K. Hatanaka, “Collision risk evaluation index based on deceleration for collision avoidance (first report) – Proposal of a new index to evaluate collision risk against forward obstacles –,” Review of Automotive Engineering, Vol.30, No.4, pp. 429-437, 2009. https://doi.org/10.11351/jsaereview.30.429
- [20] C. F. Xing, L. Yang, and Y. H. Zhang, “Study on driver’s reaction time (DRT) during car following,” Applied Mechanics and Materials, Vols.713-715, pp. 2089-2092, 2015. https://doi.org/10.4028/www.scientific.net/AMM.713-715.2089
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.